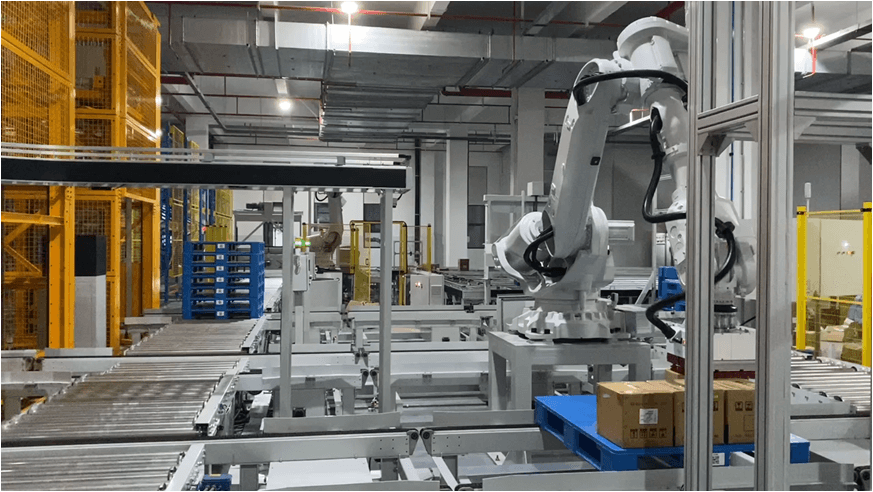
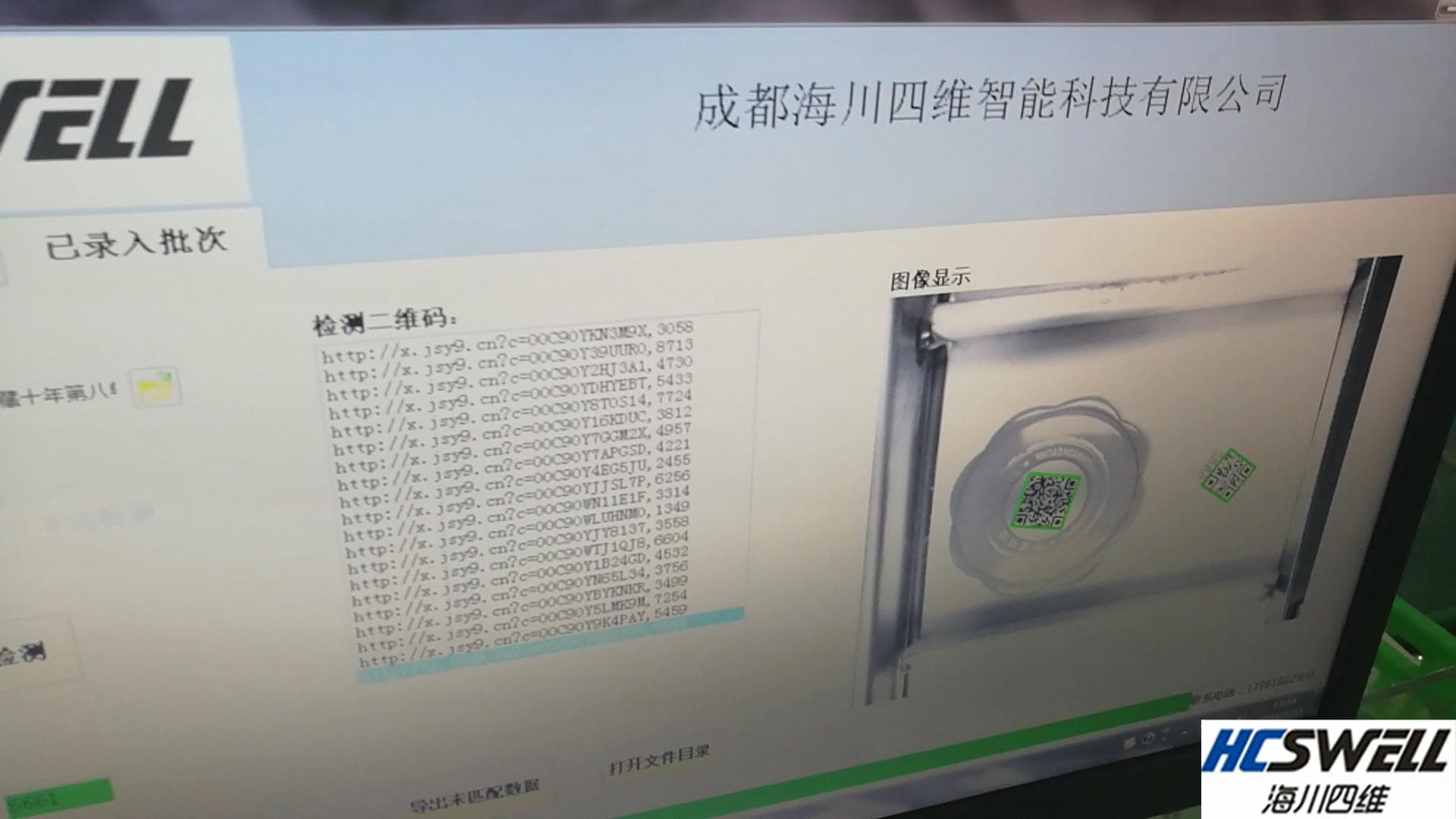
在當(dāng)下這個(gè)人工智能不斷更新不斷進(jìn)步的時(shí)代,機(jī)器人已經(jīng)逐漸代替了一些人力進(jìn)行了工作;機(jī)器人的出現(xiàn)同時(shí)也標(biāo)志著傳統(tǒng)制造業(yè)向現(xiàn)代化制造業(yè)的轉(zhuǎn)變,機(jī)器人的視覺形成一般采用的是結(jié)構(gòu)光系統(tǒng)獲取目標(biāo)的俯視三維模型,包括獲取所述結(jié)構(gòu)光系統(tǒng)的相機(jī)和投影儀的內(nèi)外參數(shù);獲取所述投影儀投射到所述目標(biāo)零件的編碼圖案;通過所述相機(jī)獲取所述編碼圖案的圖像;這三種方式合成機(jī)器人視線。

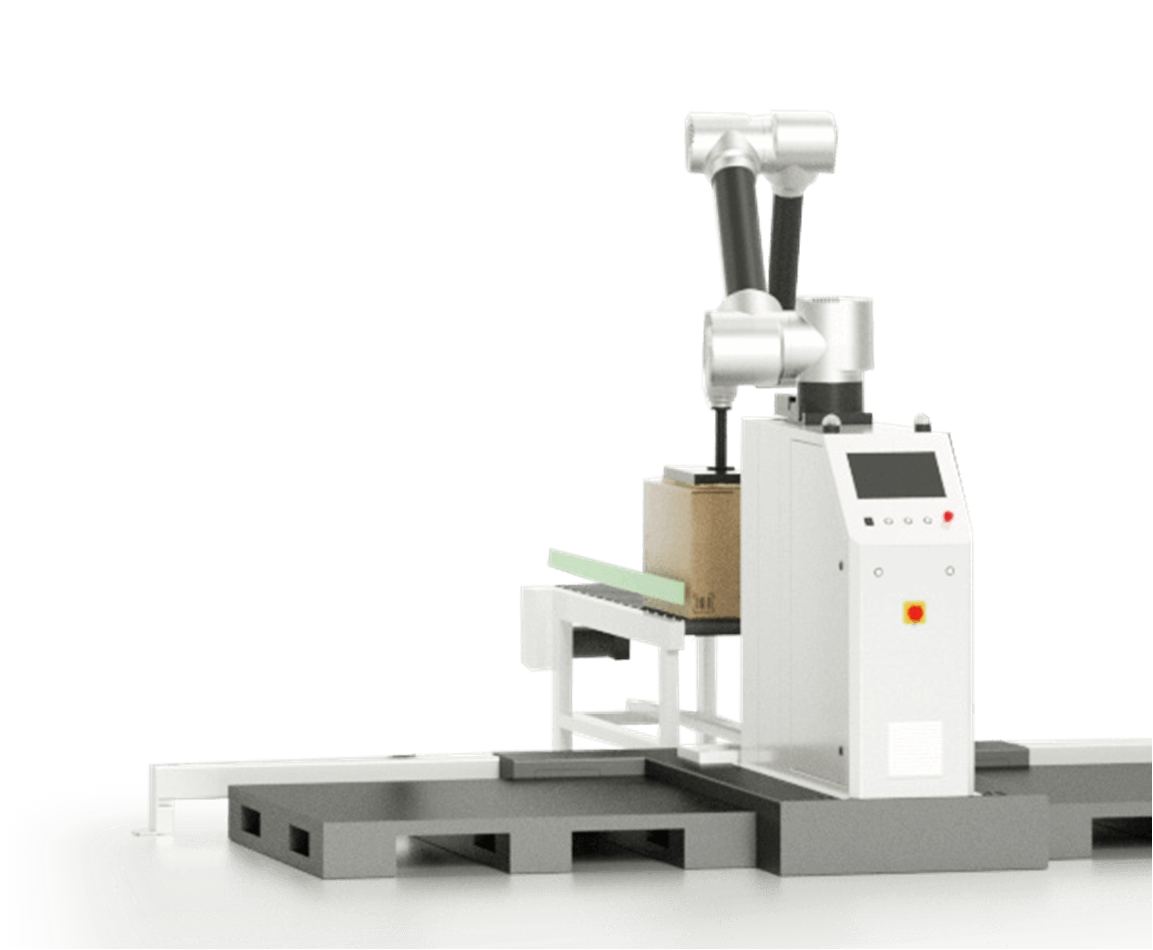
一種基于視覺的機(jī)器人分揀方法,首先采用結(jié)構(gòu)光系統(tǒng)獲取目標(biāo)零件的俯視三維模型;并將所述目標(biāo)零件的俯視三維模型與預(yù)先構(gòu)建的基準(zhǔn)模型庫中的基準(zhǔn)零件模型進(jìn)行匹配,獲得所述目標(biāo)零件的類型以及所述目標(biāo)零件的俯視三維模型與所述對應(yīng)的基準(zhǔn)零件模型之間的變換矩陣;然后根據(jù)所述變換矩陣和所述基準(zhǔn)零件模型,獲得所述目標(biāo)零件的第一位置信息;并根據(jù)所述目標(biāo)零件的第一位置信息,獲得機(jī)器人坐標(biāo)下的第二位置信息;在根據(jù)所述第二位置信息,對所述目標(biāo)零件進(jìn)行拾取,并結(jié)合所述目標(biāo)零件的類型以實(shí)現(xiàn)零件的分揀。由于首先獲取了目標(biāo)零件的俯視三維模型,并將俯視三維模型與構(gòu)建的基準(zhǔn)零件模型進(jìn)行匹配,這樣可以得到目標(biāo)零件的類型,然后根據(jù)俯視三維模型到基準(zhǔn)零件模型的變換矩陣和所述基準(zhǔn)零件模型,獲得目標(biāo)零件的第一位置信息,即拾取的位置,再通過坐標(biāo)轉(zhuǎn)換,獲得第二位置信息,從而完成準(zhǔn)確拾取和分揀,相對于現(xiàn)有技術(shù)中采用二維圖像的匹配方法而言,本發(fā)明的方法可以實(shí)現(xiàn)對任意擺放的多個(gè)零件進(jìn)行類型和位姿識別,從而完成分揀。解決了現(xiàn)有技術(shù)中零件抓取方法存在無法進(jìn)行識別和分揀的技術(shù)問題。
機(jī)器人的視覺呈現(xiàn)方法主要包括:采用結(jié)構(gòu)光系統(tǒng)獲取目標(biāo)零件的俯視三維模型;將所述目標(biāo)零件的俯視三維模型與預(yù)先構(gòu)建的基準(zhǔn)模型庫中的基準(zhǔn)零件模型進(jìn)行匹配,獲得所述目標(biāo)零件的類型以及所述目標(biāo)零件的俯視三維模型與所述對應(yīng)的基準(zhǔn)零件模型之間的變換矩陣.
本文機(jī)器人是怎么利用視覺進(jìn)行分揀的呢?:http://m.hamsc.cn/industry-news/146.html,海川四維智能科技版權(quán)所有,抄襲必究!