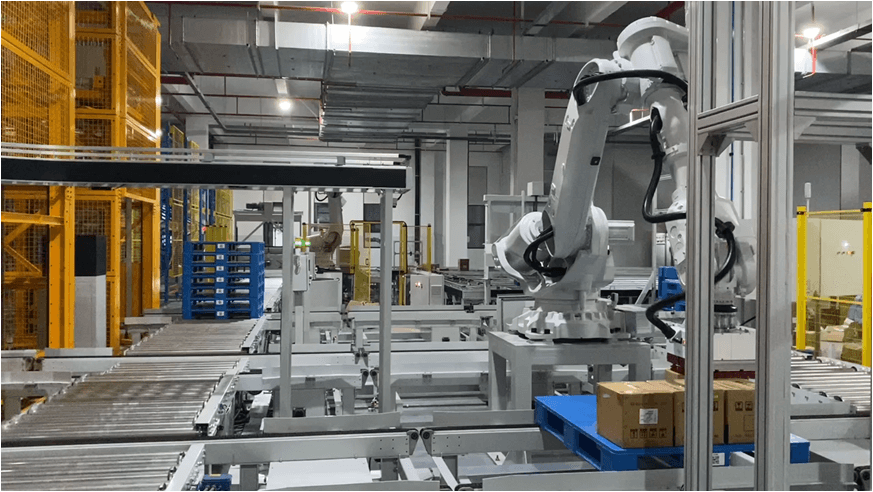
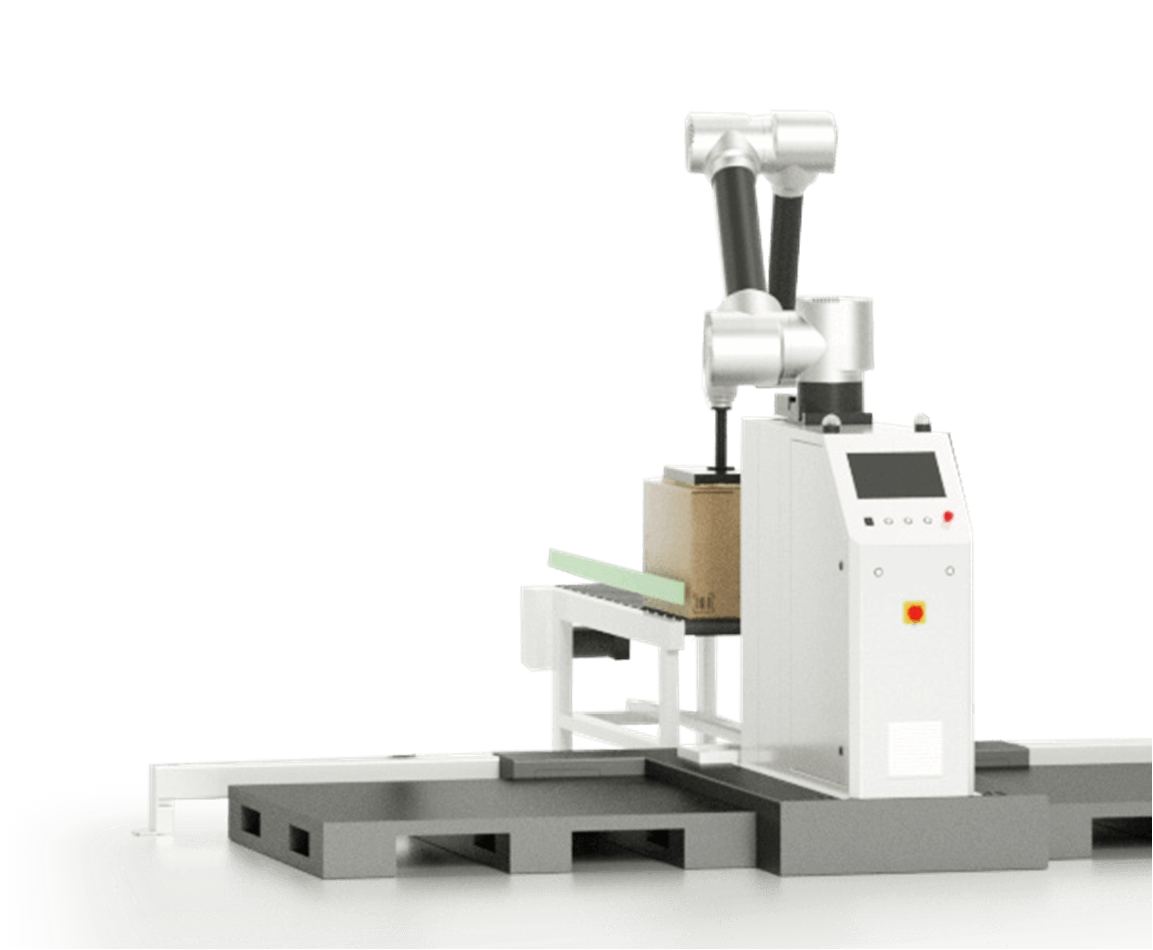
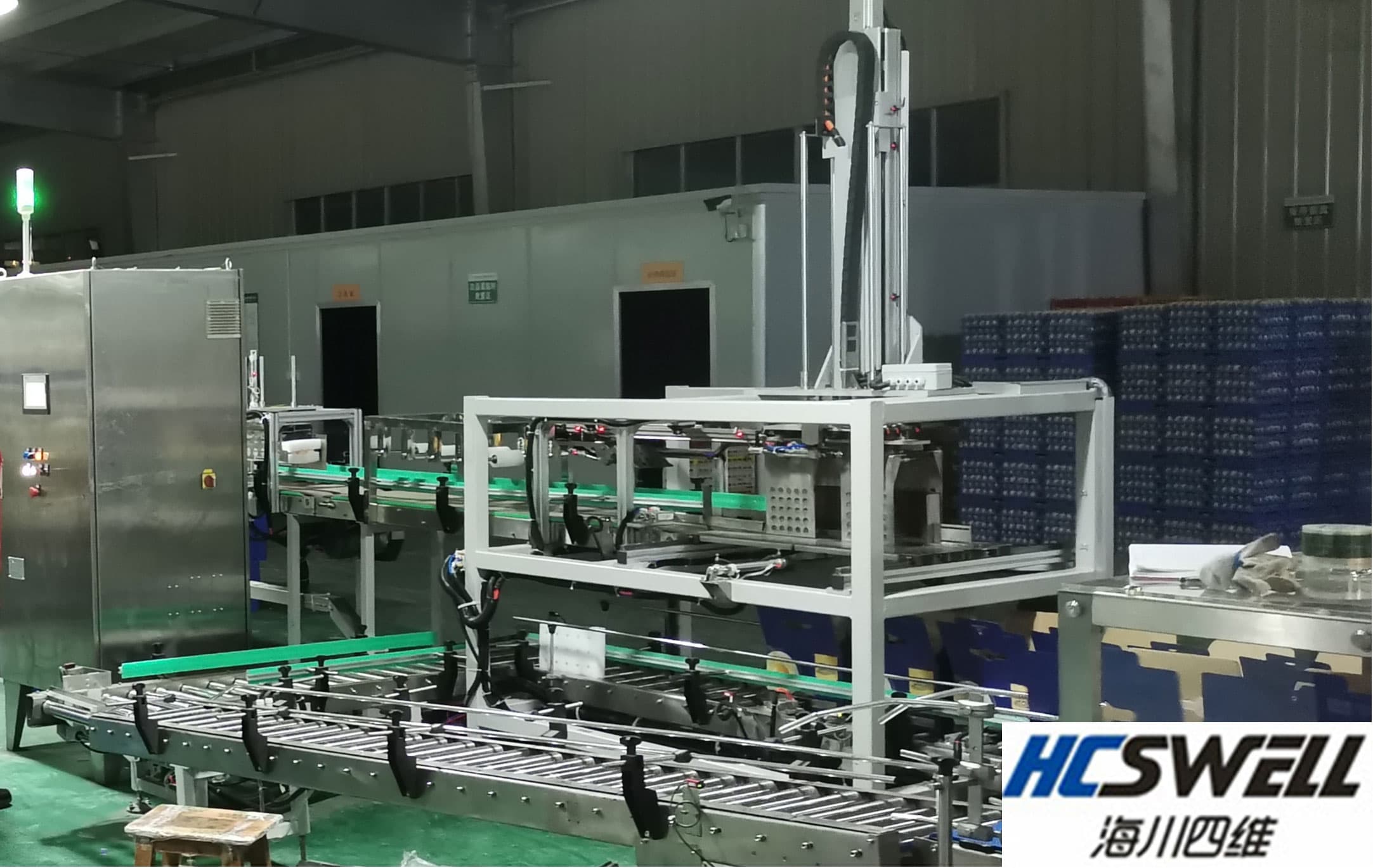
海川碼垛機器人抓手也被稱為終端執行器、夾具、機械抓手,是碼垛機器人的重要組成部分。智能機器人抓手夾具的設計一般采用圖像系統來識別工件的尺寸,并使用伺服電機來調整夾板之間的距離。

海川碼垛機器人的整體抓手包括主框架、氣缸、兩個夾板和伺服電機。夾板用于夾緊工件。其特點是圖像控制系統和調整夾具距離的機構。圖像控制系統識別工件尺寸并控制伺服電機。調整夾板距離的機構由氣缸、兩個帶齒傳動桿、兩個活動板和齒輪組成。齒輪與兩個帶齒傳動桿嚙合,氣缸連接其中一個活動板。帶齒傳動桿一端通過直線軸承與活動板連接,另一端固定在另一個活動板上,活動板與兩個夾板連接。
目前,人工碼垛的形式和運輸不僅勞動密度高、生產節奏慢、成本高,而且功能單一,僅適用于單個或多個材料的碼垛。對于材料的包裝材料,如板、頂板或堆垛板,需要設置夾具進行運輸或手動搬運,這大大提高了成本和運營成本,因此,機器碼垛的應用越來越廣泛。根據抓取物體的形狀、尺寸、重量、材料和操作要求,有多種結構形式,如夾具材料抓取、吸盤材料爪、模擬多手指抓取、夾板支撐抓取等。根據產品包裝是紙箱、編織袋、桶、散裝、重量、單面積大小等,分為瓶爪、鉗爪、快門爪、吸盤爪、瓶和堆疊爪、夾放置分區爪、抓爪和桶爪等。以下簡要介紹了海川碼垛機器人的設計元素:
1.碼垛機器人的抓手設計需要從多個方面考慮,如抓手工作目標的重量、尺寸和材料。對于不同對象的工件,選擇不同的爪子。例如,板材工件可以采用真空吸附;磁性吸盤可用于磁性介質;對于PVC材料袋,采用夾緊式。
2.對于堆垛機器人爪前端的輸送帶結構,材料袋抓取的滾筒輸送帶一般有國家標準,需要使用標準接口,對于帶式輸送帶,應考慮如何實現。
3.機器人的經濟工作模式采用電動、氣動和液壓作為電源。所涉及的結構及其制造、使用和維護成本不同。現場環境提供的電力可以降低制造成本。
4.碼垛機器人型號的選擇,機器人的最大負載能力和工作半徑,機器人的慣性,機器人的價格,考慮到抓手的設計。
5.碼垛機器人抓住目標的重量、尺寸和材料,為不同對象的工件選擇不同的爪子,如板材。
6.碼垛機器人運動端工件的空間布局,抓手是否適合生產環境。
7.所抓取原材料取決于抓手的類型,如袋裝原材料通常用抓取式,箱裝原材料用夾板式或是真空吸盤式抓手,家具板材通常用吸盤式抓手等。
碼垛機器人抓手的選用一般可根據生產現場環境來取決于的,不一樣的工作需求,對抓手的設計要求不一樣。海川碼垛機器人的廣泛使用既緩解了勞動強度,又減少了人力生產成本,為公司的快速發展帶來了很多優點。
本文海川機器人碼垛機抓手:http://m.hamsc.cn/industry-news/159.html,海川四維智能科技版權所有,抄襲必究!