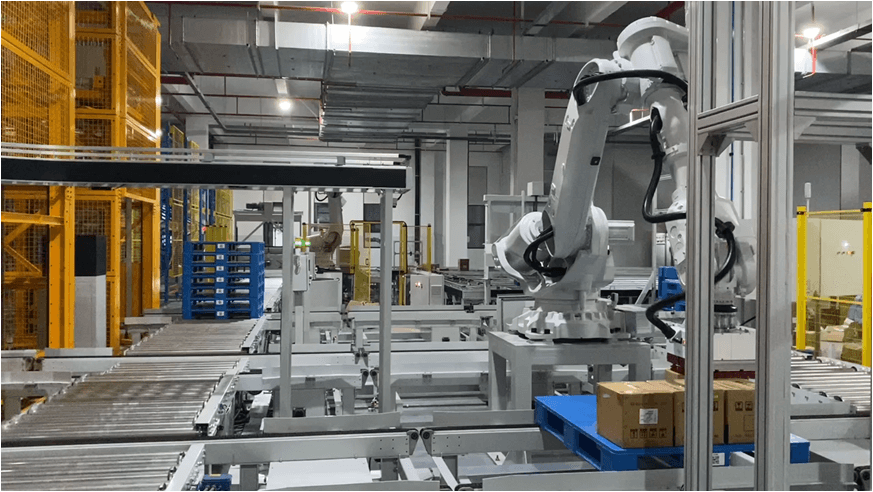
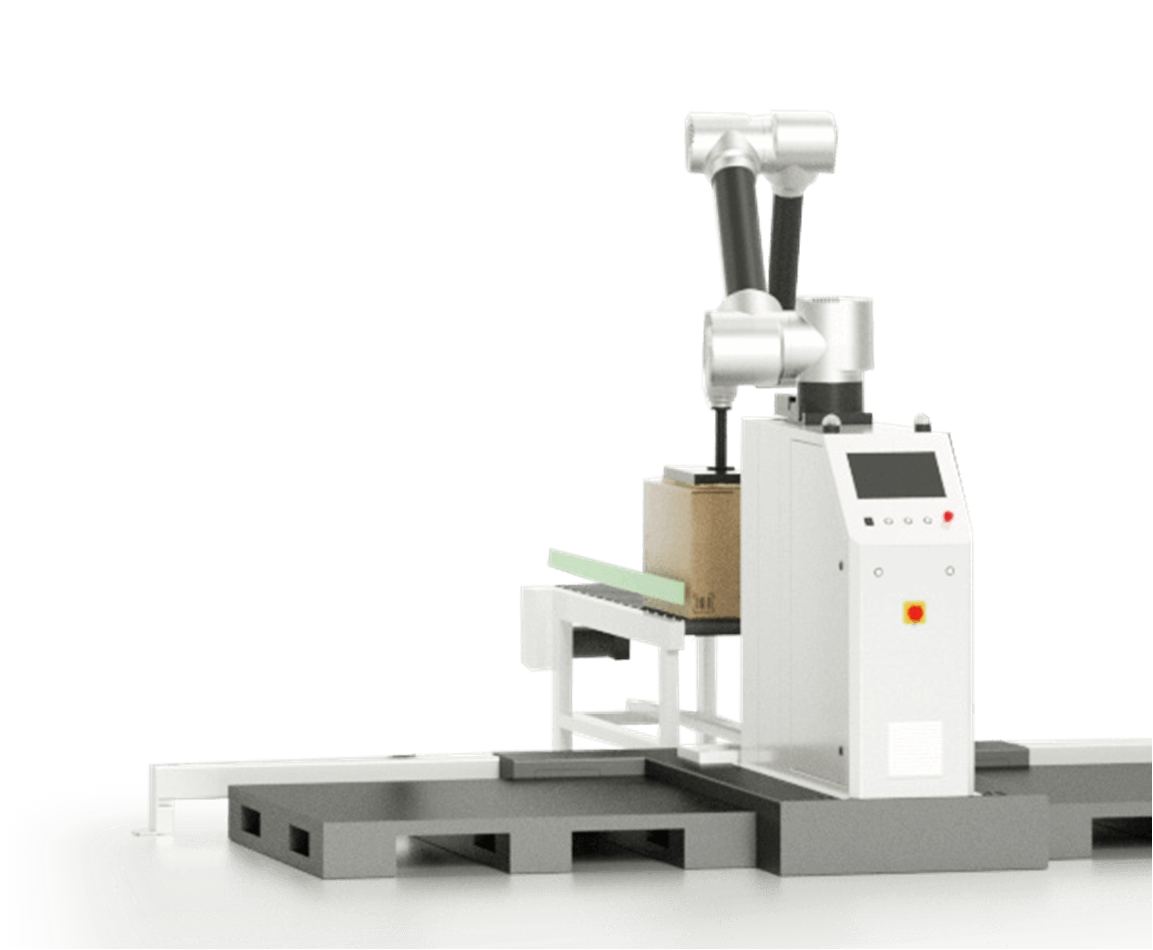
海川AGV復合機器人可用于工件的抓取、裝配、搬運、裝卸。工業應用AMR機器人與AGV小車沒有本質的區別,只是部分功能的增強,而這些功能不是AGV小車不可實現,只是在大多數工業環境中不允許應用。

以下是工業應用AMR機器人在技術上的幾點認識以及與海川AGV復合機器人的對比:
1. 目前工業應用的此類產品(AMR/AGV),都須在已知的環境中運行,即事先構建并獲得運行環境的全局坐標,也就是必須知道自己的當前位置和目標點的位置;
2. 當目標點坐標確定后,在路徑規劃上,AMR機器人運行可分為兩種模式:一種是按預先設置的路徑(地圖)運行,當遇到障礙時,單機能夠繞行障礙。而此方式與AGV小車幾乎是相同的:激光導引AGV小車在插入系統時,能夠從已知任意位置行駛到最合適的路徑點,與繞行原理相同。另一種是非預先設置路徑,即自由路徑或開放路徑,由單機根據目標點的坐標信息,即時動態規劃路徑,筆者理解為單機本身采用了“自學習”和“神經網絡”,能夠利用歷史場景對當前狀況進行判斷,以確定行駛方向。此方式與目前的AGV小車比較矛盾,AGV畢竟是經過“導引(Guided)”的,必須運行在預設路徑上,一旦脫離路徑即為故障。但十多年前,有些AGV小車就實現了部分動態路徑規劃功能:為了將貨物直接裝入集裝箱,平衡叉式AGV利用位置估算(Dead reckoning)值,及其他傳感器的“相對位置”信號,實施了“末端”動態路徑規劃;
3. 在其他方面,AGV小車的自主性能并不差:導航水平與速度關聯、轉向角度與速度關聯、工作強度與設備健康度關聯等;
4. 在交通管理方面,AMR機器人的自主性可能更多地體現在“主觀能動性”上:由于單機具備較強的動態路徑規劃能力,當多臺機器人相遇時,能夠主動避讓,不會出現AGV小車的“死鎖”現象。這種將交通管理下沉到單機,使單機運行更為智能的做法,目的是為了提升工作效率。而筆者認為,根據不同應用場景(開工模式、正常模式、收工模式等),采用“潮汐”路徑的方法來減輕交通壓力以獲得更高效率,較為合適;
5. 在任務調度方面,先進的調度策略使得AGV小車的“主觀能動性”得以展現:過去是由上位控制系統安排任務到車輛,而目前的策略更傾向于AGV小車主動向上位系統申請任務,能夠有效提升系統效率(減少了空跑率),降低系統能耗。
總的來看,海川AGV復合機器人是沿著“預設”路徑行駛;而AMR加入分為兩類,第一類與AGV機器人幾乎相同,按照“預設”路徑行駛,具備障礙繞行功能;另一類以需要到達的目標點為控制對象,能夠根據環境主動規劃行駛路徑。
本文海川AGV復合機器人與AMR機器人區別:http://m.hamsc.cn/industry-news/167.html,海川四維智能科技版權所有,抄襲必究!