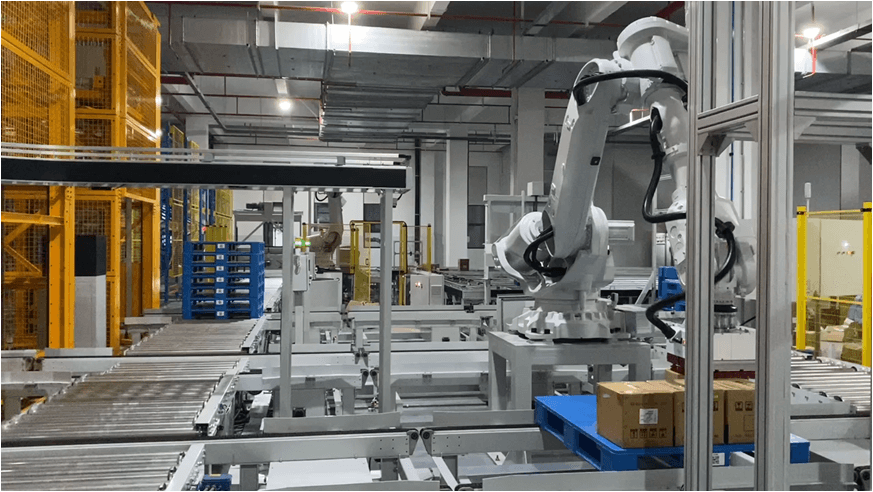
海川碼垛機器人的安裝是在現場進行的,真實的生產運營環境會受到空間利用等方面的影響,導致機器人的很多姿勢都受到一定的限制,在工業機器人的實際工作中容易導致振動、位移等現象,最終導致工業機器人無法按設計速度運行。
")
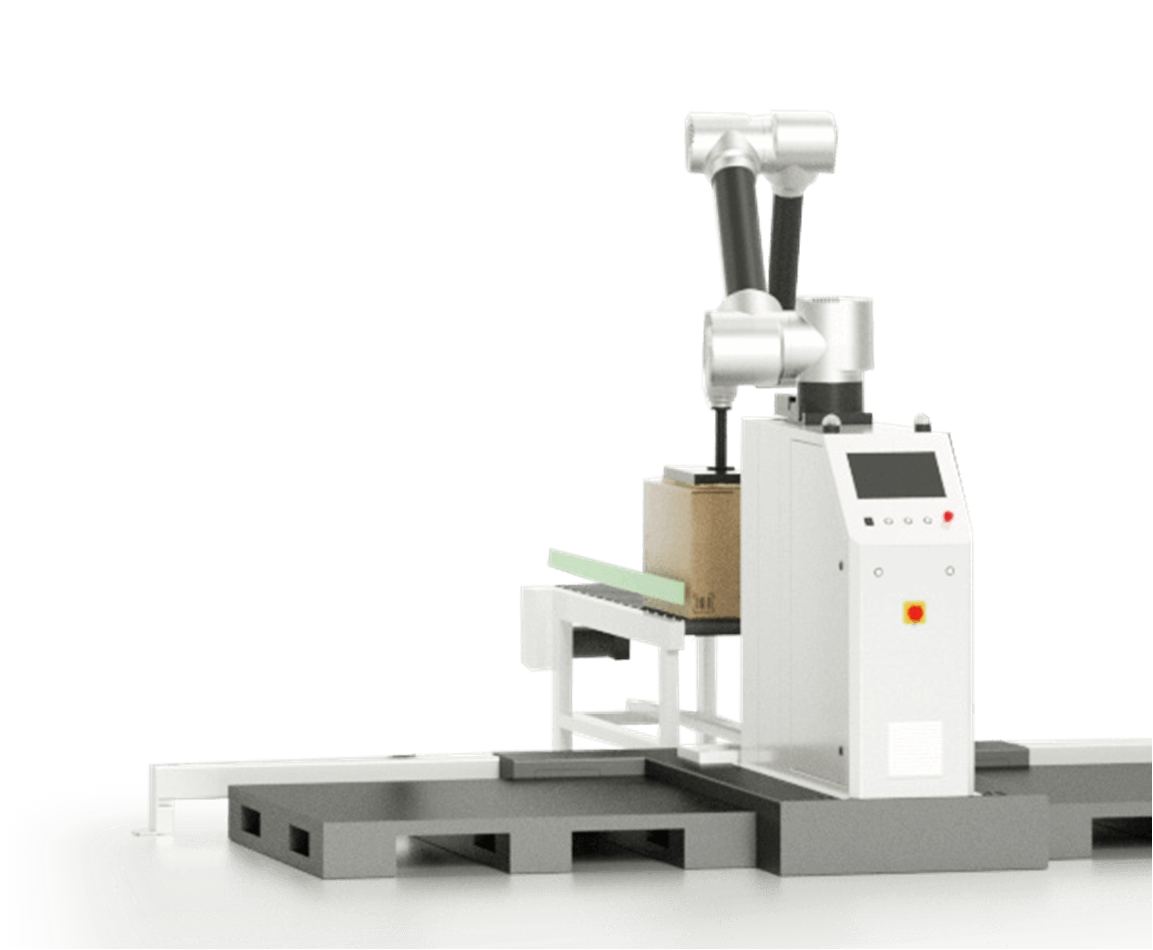
因此,在海川碼垛機器人安裝完成后,在實際生產工作之前,進行現場調試和校準是非常重要的。具體來說,調試工作主要包括以下兩個方面。1、將工業機器人的軸歸零。機器人安裝并出廠后,工業機器人的軸可能不為零。如果這樣的機器人直接投入生產,各軸的重心可能無法準確固定在支撐點上,這可能會導致生產過程中產生傾斜,這不僅會影響正常的工業生產,還會危及工人的生命安全,因此,對工業機器人的軸進行調零是非常必要的。通常,零點返回標志將留在工業機器人的每個軸臂上。只需操作每個軸返回到此位置,這意味著每個軸都已調整為零。
此外,每個軸原點的六個軸的相應角度將粘貼在機器人的底座上,這是調試時的重要參考。但具體調試需要根據現場環境和要完成的任務進行具體分析。例如,在此過程中,相關調試人員可以具體規劃合理的“路線”歸零,然后通過示教器將機器人依次移動到每個點,然后記錄相關數據。最后,調試人員結合自己的校對經驗進行反復實驗,根據實際生產要求對工業機器人的軸進行調零和調試。
工業機器人信號處理與調試。這種改進型的現代工業機器人可以按照人工智能的方式按照指定的原則和指南自動操作。例如,他們可以根據接收到的信號完成信號指令指定的運行軌跡,以便快速適應新的環境。工業機器人系統并非單獨使用。工業機器人在投入生產過程中,必須與其他外圍設備連接,這些外圍設備上的信號必須通過CC-link與工業生產機器人系統的信號連接。因此,在機器人安裝出廠后,在投入實際生產之前,對工業機器人的信號處理和調試是一個非常必要的環節。
具體來說,在調試期間需要設置CC-link,但需要注意的是,調試人員設置的CC-link信號必須與PCC的型號、主站、從站和車站信息一致。同時,在完成信號設置后,在PLC編程期間,需要對所有信號進行行和列列表和注釋。只有經過這樣的信號調試,海川碼垛機器人才能正式投入生產和使用。
本文海川碼垛機器人的調試:http://m.hamsc.cn/industry-news/275.html,海川四維智能科技版權所有,抄襲必究!