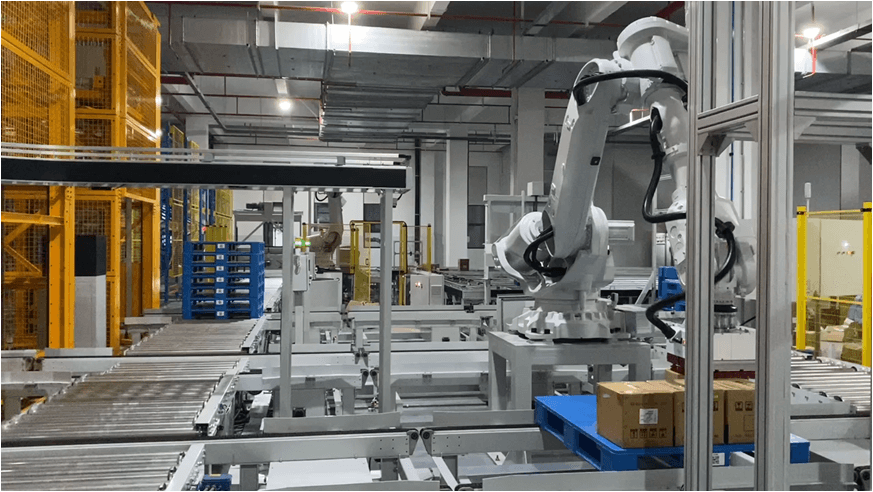
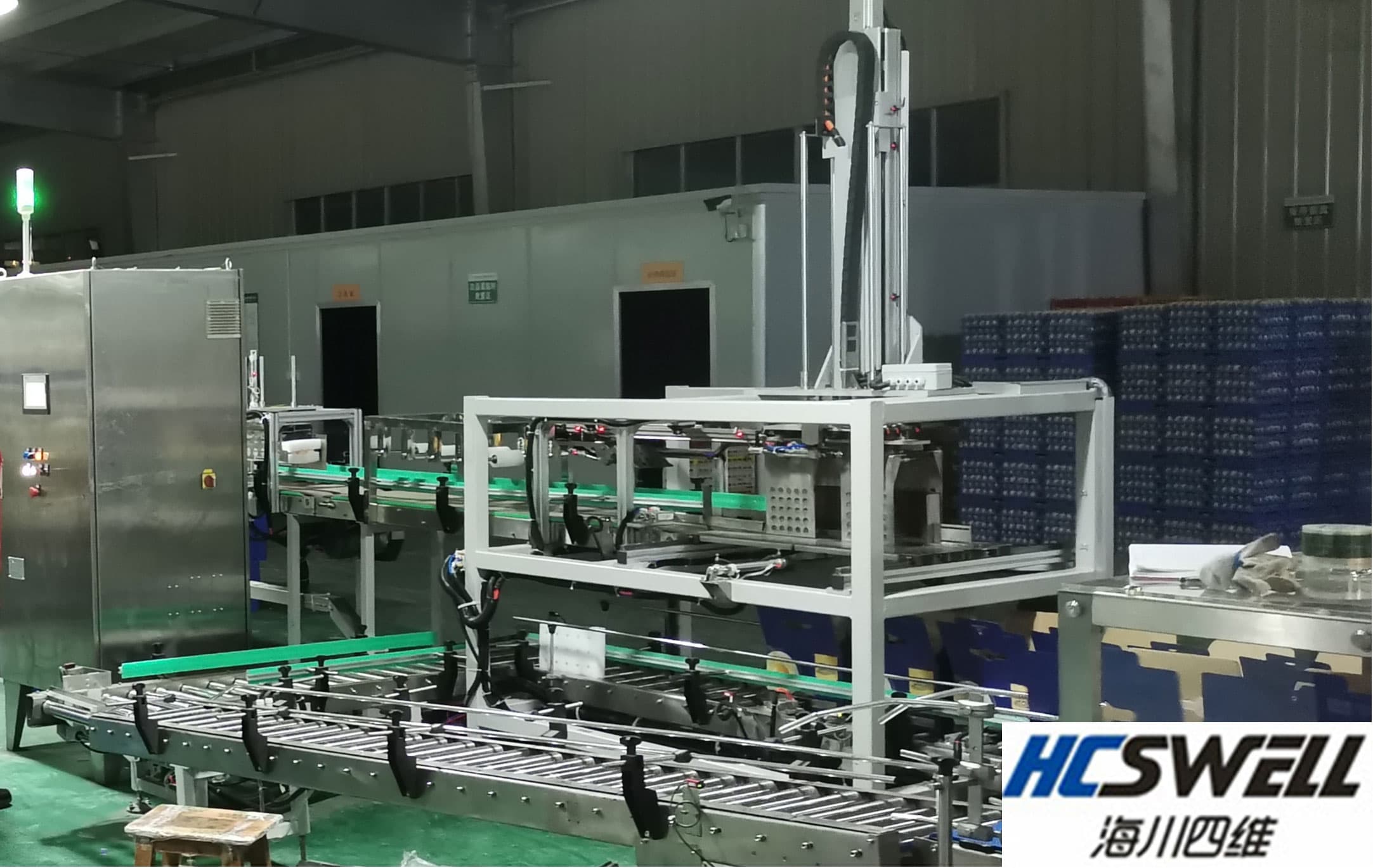
伴隨工業(yè)生產4.0時代的來臨,人工智能應用的逐步成熟期,智能機器人市場的發(fā)展即將迎來春季。在其中,AGV的增勢迅速,顯得格外突顯,這些產品五花八門,在汽車產業(yè)、家用電器生產制造、電商倉儲物流、香煙等行業(yè)獲得廣泛應用。
AGV作為智能物流的核心,已經向著更為智能化系統、智能化方向演化,其導航科技的飛速發(fā)展和創(chuàng)新是一個非常非常值得關注的問題。
根據全部智能制造系統的高速發(fā)展,市場中較比較常見的導航方法根據技術性大概可以分為三代:第一代是電磁感應和磁導航,第二代是現在行業(yè)流行的二維碼導航,第三代分成兩類,各是根據激光器與視覺上的二種SLAM優(yōu)化算法導航。

(1)AGV復合機器人靜態(tài)數據位置計算方式:
當小車第一次進入系統軟件,AGV復合機器人的現階段位置不清楚時,需要進行原始位置計算,根據較為一些已經知道遮光板的己知方向,小車控制板里的導航控制模塊計算出小車的位置。
(2)AGV復合機器人在狀況下不斷動態(tài)性位置計算方式
當復位位置計算完成后,小車就開始運動,在的過程當中,小車要進行不斷位置計算。下邊選用位姿估算矯正法展開分析。這類估算方法的數學課運動模型要以“位姿估算”為核心的。它運用小車現階段運轉的速率、轉為的視角、時間間隔等主要參數對下一位置開展估算,計算出相對于前一位置新的位置。
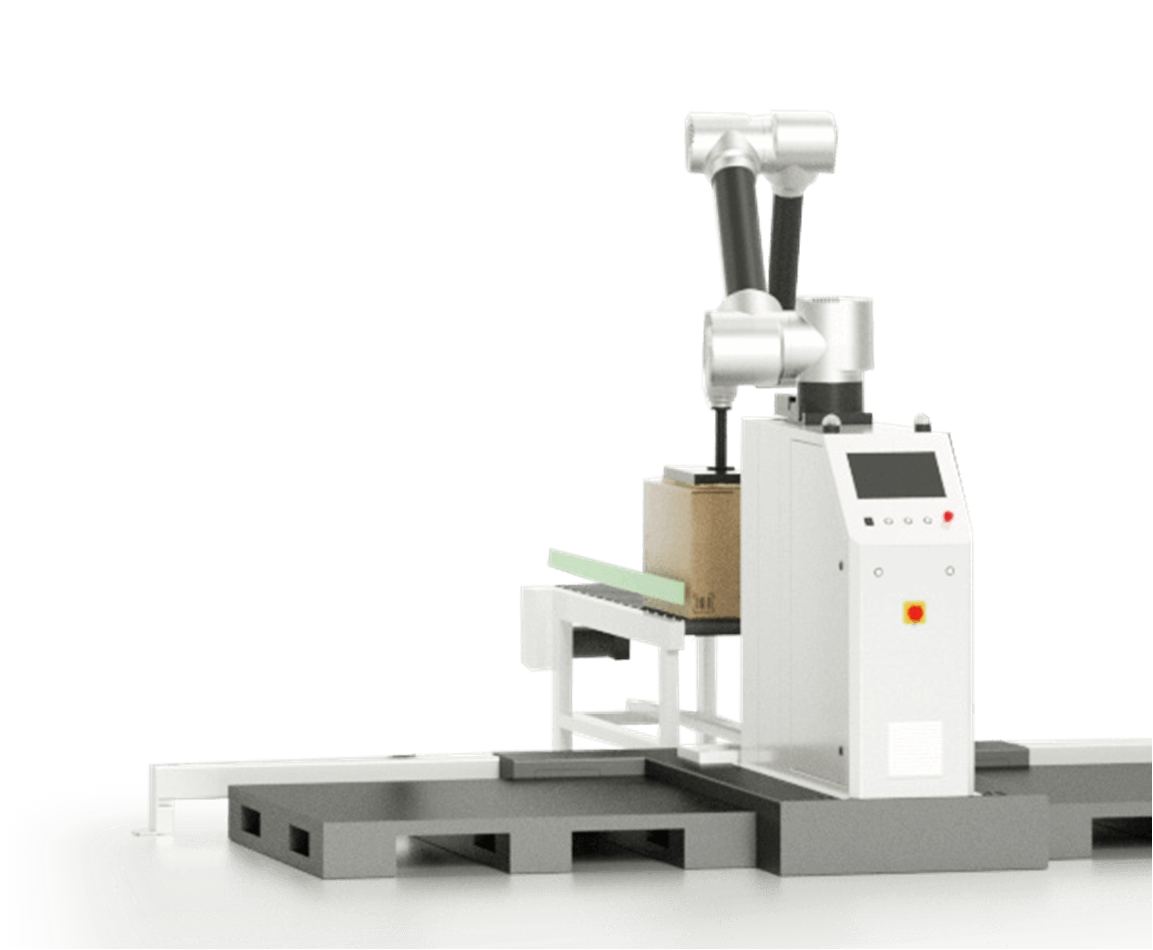
激光導航AVG的特征
激光導航是當前AGV系統內普遍使用的導航方法,依據它導航基本原理,AGV復合機器人在導航區(qū)中可自由飛翔并精準定位;在導航范圍之內,小車的走動途徑可按照實際規(guī)定隨時隨地修改,可充分運用AGV的軟性,提高工作效率。有很多系統軟件必須在已有的場所環(huán)境下開展,這時候,激光導航AGV將自動會顯得格外適合。
本文AGV復合機器人在智能物流中的運用:http://m.hamsc.cn/industry-news/503.html,海川四維智能科技版權所有,抄襲必究!