依據構造區劃
依據機械結構的差異,機器人碼垛機包含如下所示三種方式:笛卡耳式、旋轉關節式或吊裝平臺式。
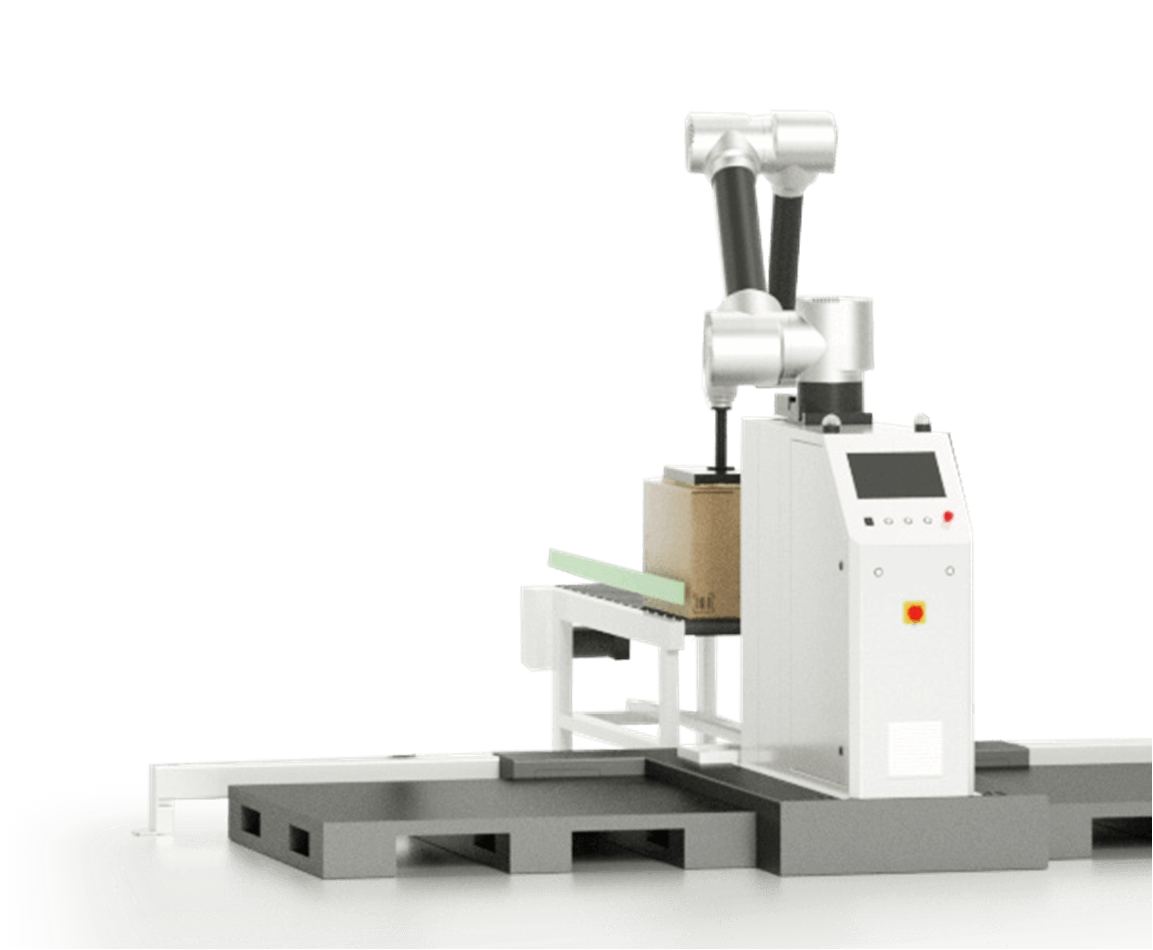
①笛卡耳式機器人碼垛機:主要是由四組成:立桿、X向臂、Y向臂和著力點,以四個可玩性(包含三個移動關節和一個旋轉關節)實現對物料的碼垛。這樣的方式的碼垛機結構簡易,人體剛性很強,可搬凈重比較大,適用偏重物料的碼垛。
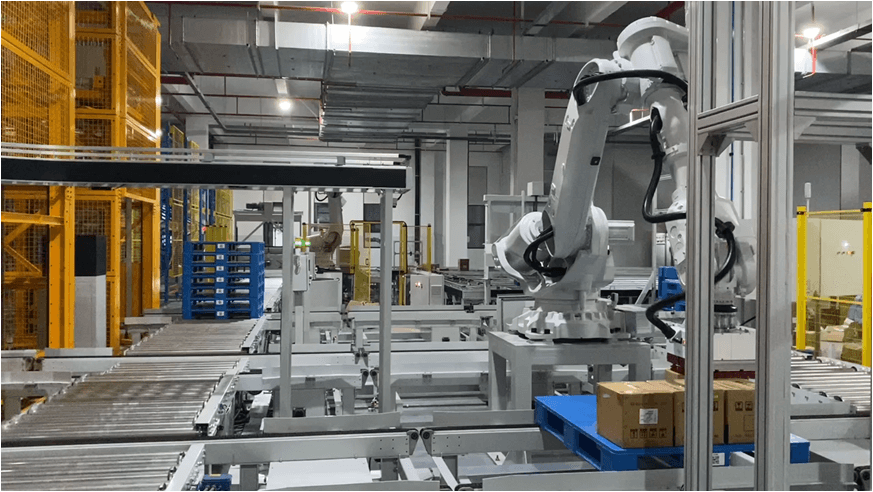
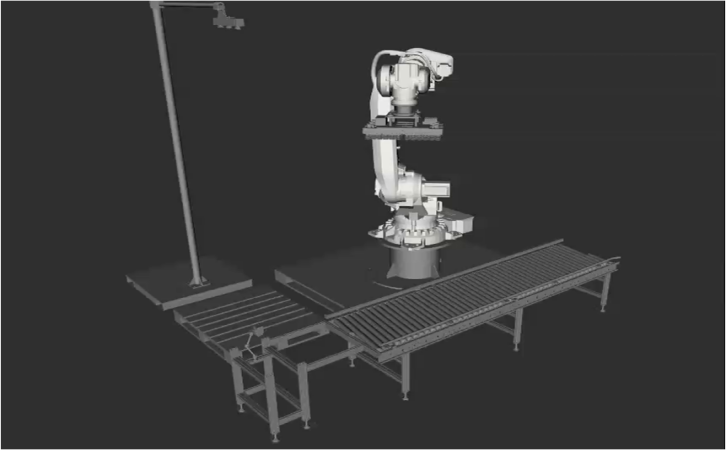
②旋轉關節式機器人:碼垛機繞整體機身轉動,包含四個旋轉關節:腰關節、肩關節、肘關節和腕關節。這樣的方式的碼垛機是由步態分析的形式完成程序編寫的,即操作工手執示教盒,操縱機器人按照規定姿勢而健身運動,因此運動時便儲存在存儲芯片中,之后自啟動的時候可以重現這一運動時。這類機器人整體機身小又姿勢范圍廣,可以同時進行一個或多個托盤的與此同時碼垛可以機動靈活地相匹配開展多種產品生產流水線工作。
③吊裝平臺式:將機器人胳膊裝到吊裝架子上稱之為架式機器人碼垛機,這類機器人碼垛機具備比較大的工作范圍,可以爬取比較重的物料。

依據堆積規定區劃
①單面機器人碼垛機
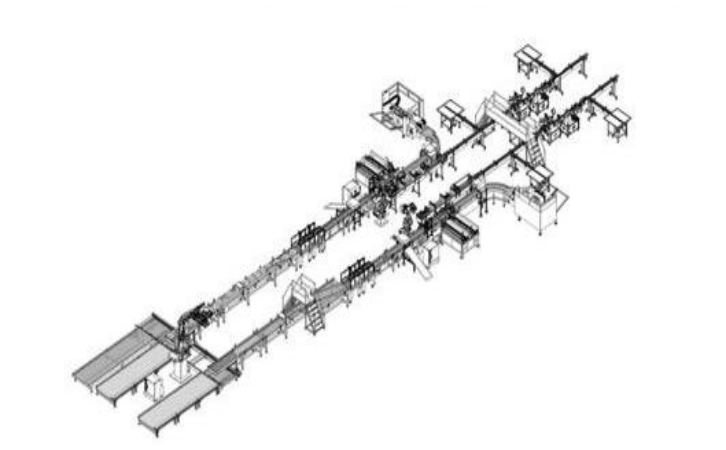
單面構造的機器人碼垛機還是比較最基本的,主要依靠輸送帶把物料輸送來,等抵達轉向機構時,能夠按照相關規定方向調整一下,提前準備完成后,可以進到層輸組織上。只需在這個地方將產品按設置的順序排列開展密切的排序就行了,然后通過輸送輥把排序好產品移交至下一個工序,那樣機器人碼垛機的堆垛工作算實現了。
②雙層機器人碼垛機
有單面對應的一定有雙層,肯定比單面機器人碼垛機繁雜。大家可以看到雙層機器人碼垛機的托送板要在輸送帶下邊的,還是能夠開展上下一定的。設備在開展堆垛時,物料會到整齊地排序在托送板里,再將托送板設在載左極限地方。當輸送帶輸送的物料被隔板遮擋時,恰好排成一行。隨后托送板偏移,再像上面的流程一樣物料又排列成一行。依此類推,物料每多一層,機器人碼垛機的升降平臺高度就會下降一層,直至將物料堆到一定相對高度后終止。
③排序機器人碼垛機
這類機器人碼垛機是把物料排一排排之后進行輸送的,推板會把輸送的物料放進骨料臺子上。之后往左邊移動,從下向上推,將三層物料堆垛在一起。在這過程中,會出現斜坡設備確保流程的圓滿完成,并且骨料臺特殊性還會有利于機器人碼垛機進行堆垛。這幾點只是常見的機器人碼垛機。
本文機器人碼垛機分類:http://m.hamsc.cn/industry-news/583.html,海川四維智能科技版權所有,抄襲必究!