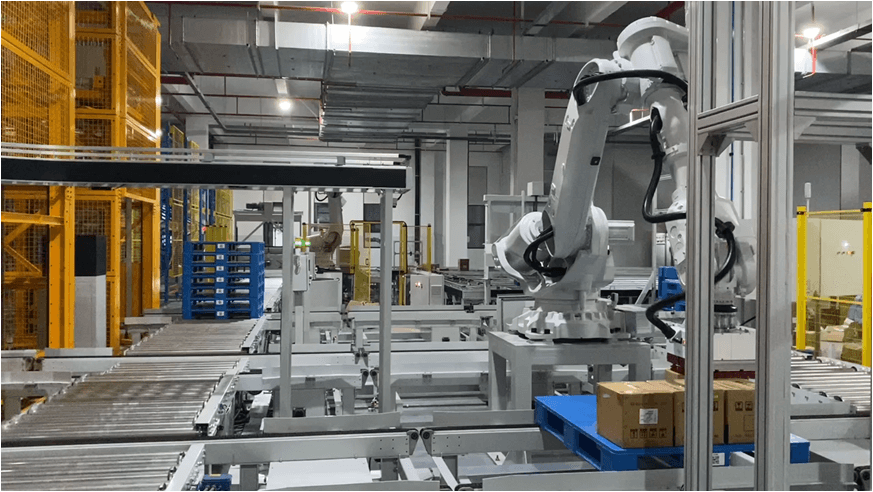
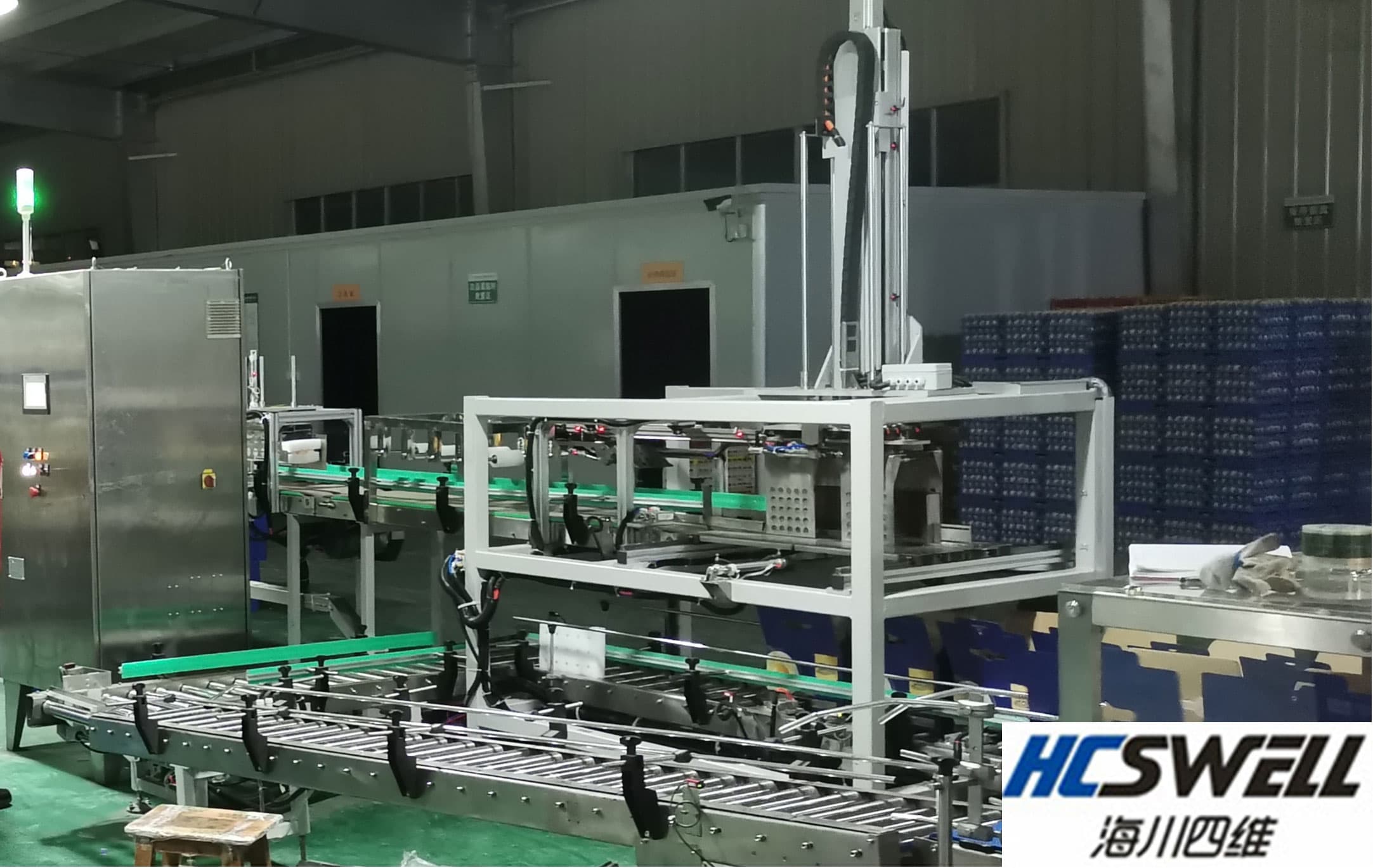
3D拆垛機器人的3D機器視覺是一項出色的技術,可以為特殊定位、鑒別和檢查每日任務給予更高精確性,而傳統2D機器視覺系統通常沒法可靠地取得成功。它帶來了一套取代2D視覺上的技術,可以非常清晰地處理2D系統不敢面對的難點問題。
3D系統實質上比2D系統復雜,3D機器視覺適合于更加需要準確地剖析有關對象尺寸、紋路和深入的運用,比如農牧業、生產制造、檢測與質量管理。這些都能從3D視覺效果中受益,但在2D與3D技術中間作出決定將在于所需要的精度水準,測量速率,物體是不變的或是移動,及其物體以及環境中的照明特點。
3D視覺效果有什么不同類型?
機器視覺系統中常用的4D成像技術主要包括3種類型:立體視覺、飛行時間(ToF)、激光器三角測量(3D線條)和人臉解鎖。
立體視覺運用2個或幾個通過校正并集中在同一物體里的2D照相機。它們可以在動態環境中給予完整的FoV3D測量,根據從各個角度對光線開展三角測量。
或是,激光器三角測量應用垂直在光線的照相機測量帶入到物體里的激光的改變。此方法必須連續不斷的線性運動,比如輸送帶,但帶來了很高的顯像精度。

飛行時間(ToF)測量來源于調配紅外線照明源的光抵達物體并返回ToF傳感器所需的時間,隨后根據這些測量結論形成云數據。
2D與3D機器視覺系統
將2D機器視覺照相機與顯像庫手機軟件緊密結合是切實可行的對策。但是,在開展測量時,照明的轉變會讓精度產生不利影響。過多光線也會產生過爆的圖片,造成光線失光或物體邊緣模糊,而且照明不夠會讓2D圖像中出現邊緣和特點的畫面質量產生不利影響。
在照明不易操縱,因而改變不了以固定鏡頭的應用中,2D機器視覺系統可能無法形成靠譜的圖像。
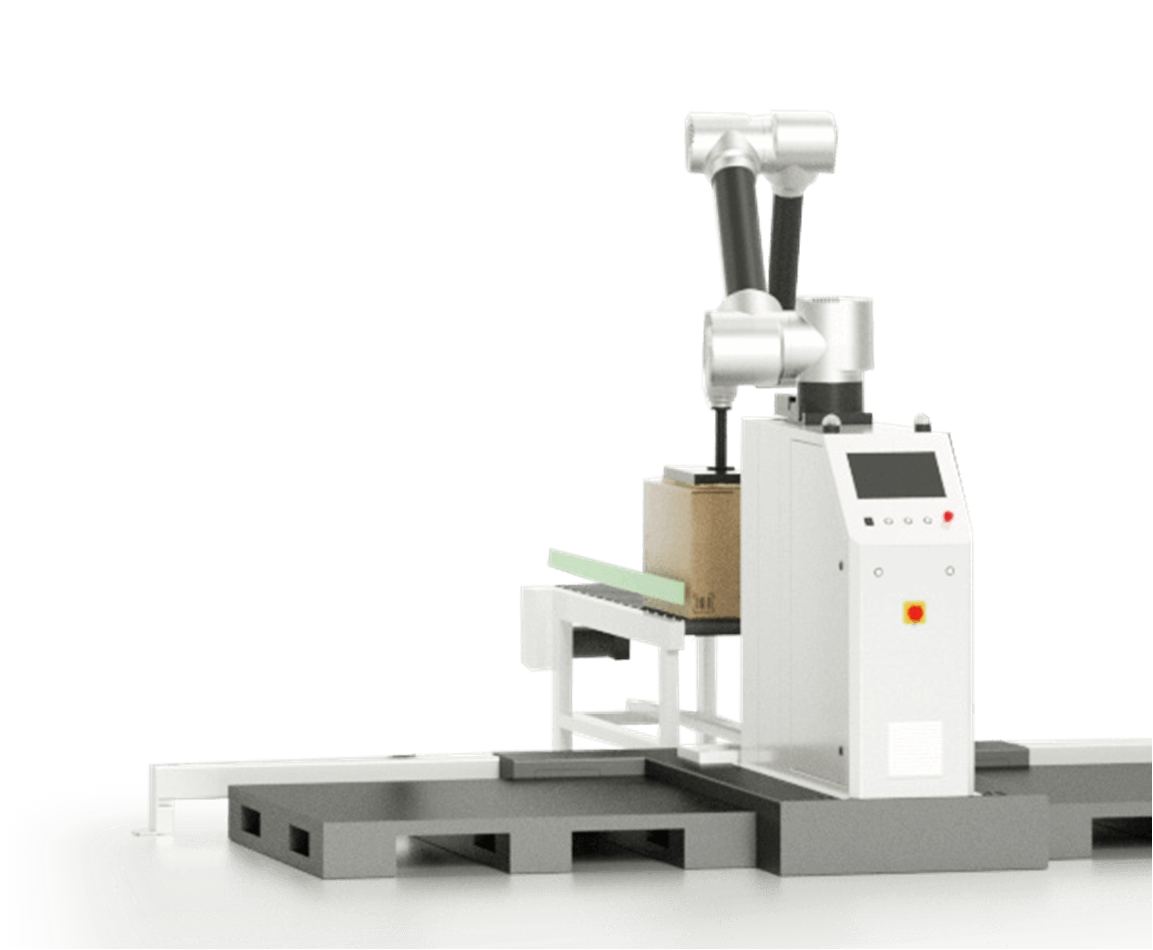
3D拆垛機器人的3D機器視覺照相機能通過紀錄準確的深度信息來解決這個問題。點圖和深度圖是兩類的3D圖像,含有相對高度精確,有價值的數據信息。物體的每一個清晰度都是在空間內被考慮到,并為消費者提供X、Y和Z平面圖數據以及每一個軸相對應轉動數據信息。
與3D對比,這也使得2D機器視覺在涉及規格測量、空間管理、薄厚測量、Z軸表面檢測和涉及深層的質量控制的應用中變成一種特殊的挑選。傳統2D圖像處理仍然能夠與收集到的圖像一起使用,進而為很多機器視覺難題建立可執行解決方案。
本文3D拆垛機器人的3D視覺與2D機器視覺相比的競爭優勢:http://m.hamsc.cn/industry-news/663.html,海川四維智能科技版權所有,抄襲必究!