隨著工業(yè)自動化的不斷發(fā)展,機器人的應用也越來越廣泛。其中,協(xié)作移動碼垛機器人成為了許多企業(yè)智能化轉型的關鍵工具。其工作原理和技術特點得到了越來越多的重視和研究。
一、工作原理
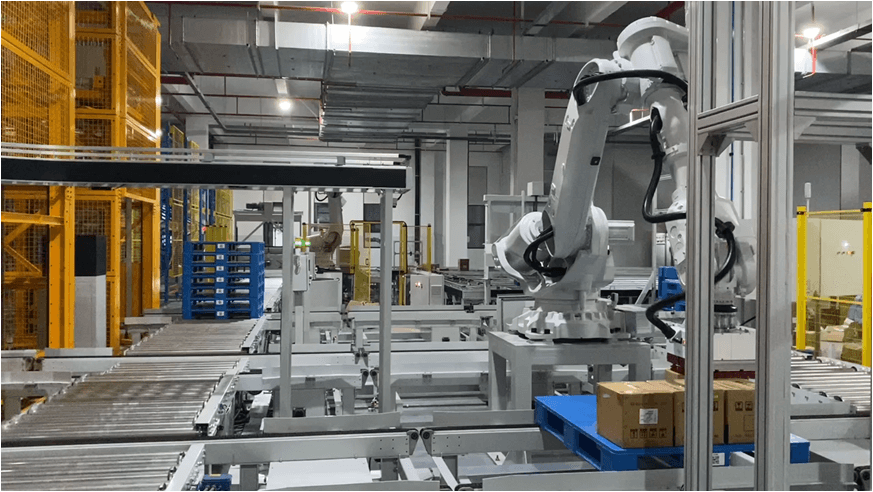
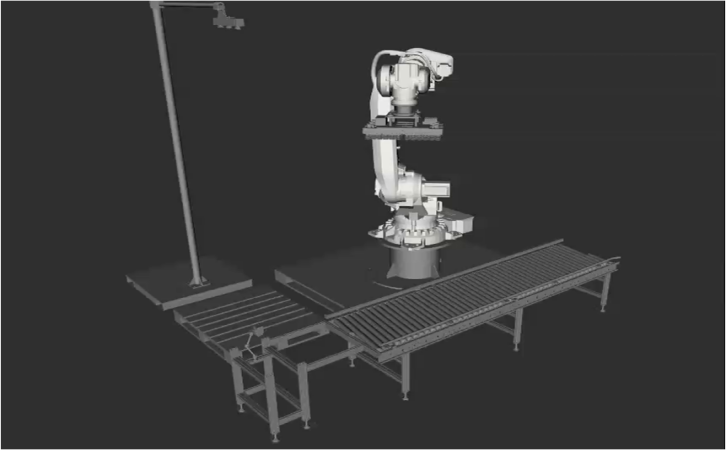
協(xié)作移動碼垛機器人的工作原理是通過機器人控制系統(tǒng)、機械運動系統(tǒng)和視覺識別系統(tǒng)等多種技術手段,實現(xiàn)對物品進行自動抓取、搬移、碼垛等操作。機器人可以通過與人類的協(xié)作,實現(xiàn)更高效、更安全、更精確的工作。同時,機器人具有自主學習和自適應的能力,可以根據不同的物品特性和工作環(huán)境,自動調整工作方式和路徑,提高工作效率和穩(wěn)定性。
二、具體地說,協(xié)作移動碼垛機器人的工作流程如下:
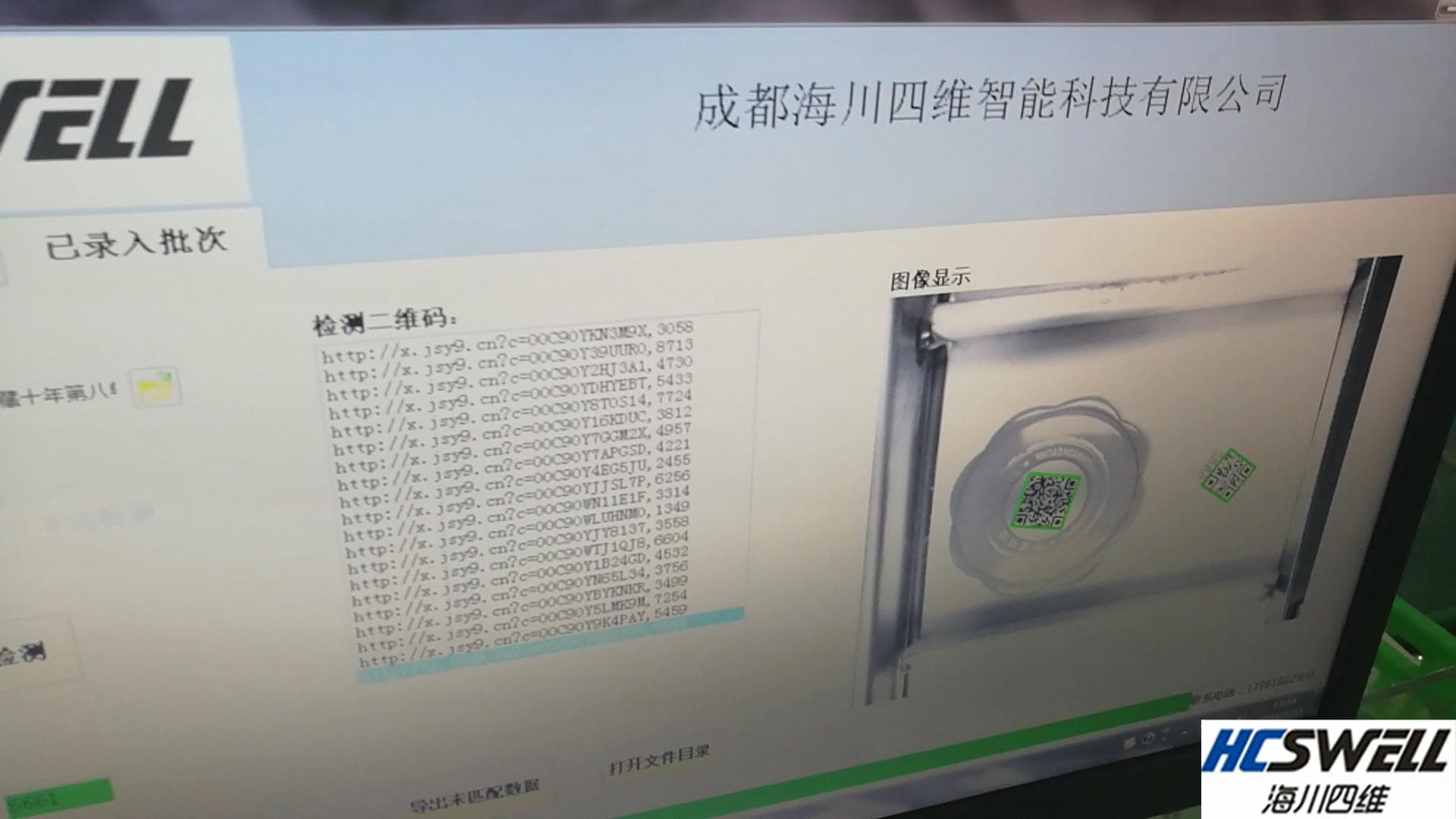
1、機器人通過視覺識別等技術手段對待處理物品進行掃描和識別,根據掃描結果,計算出貨物的位置、形狀和尺寸等信息。
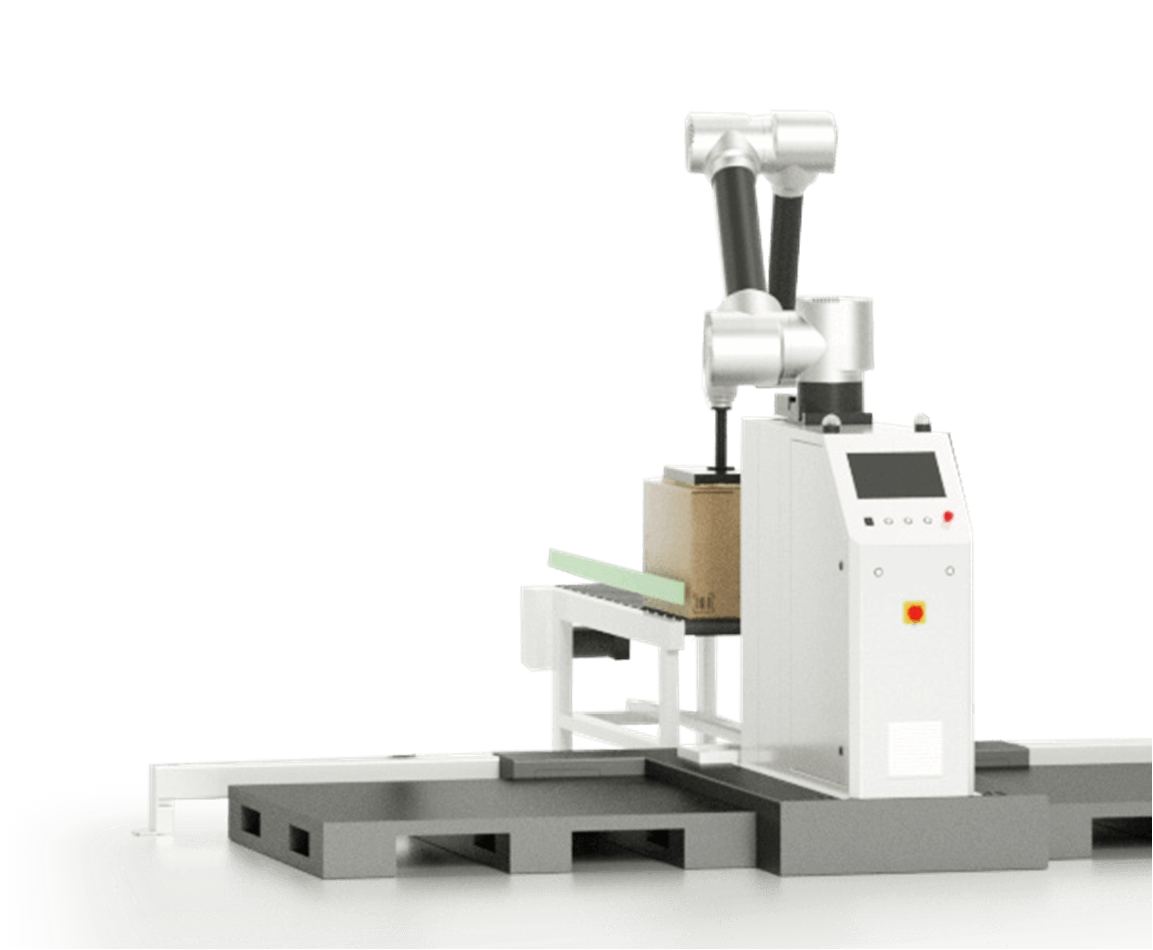
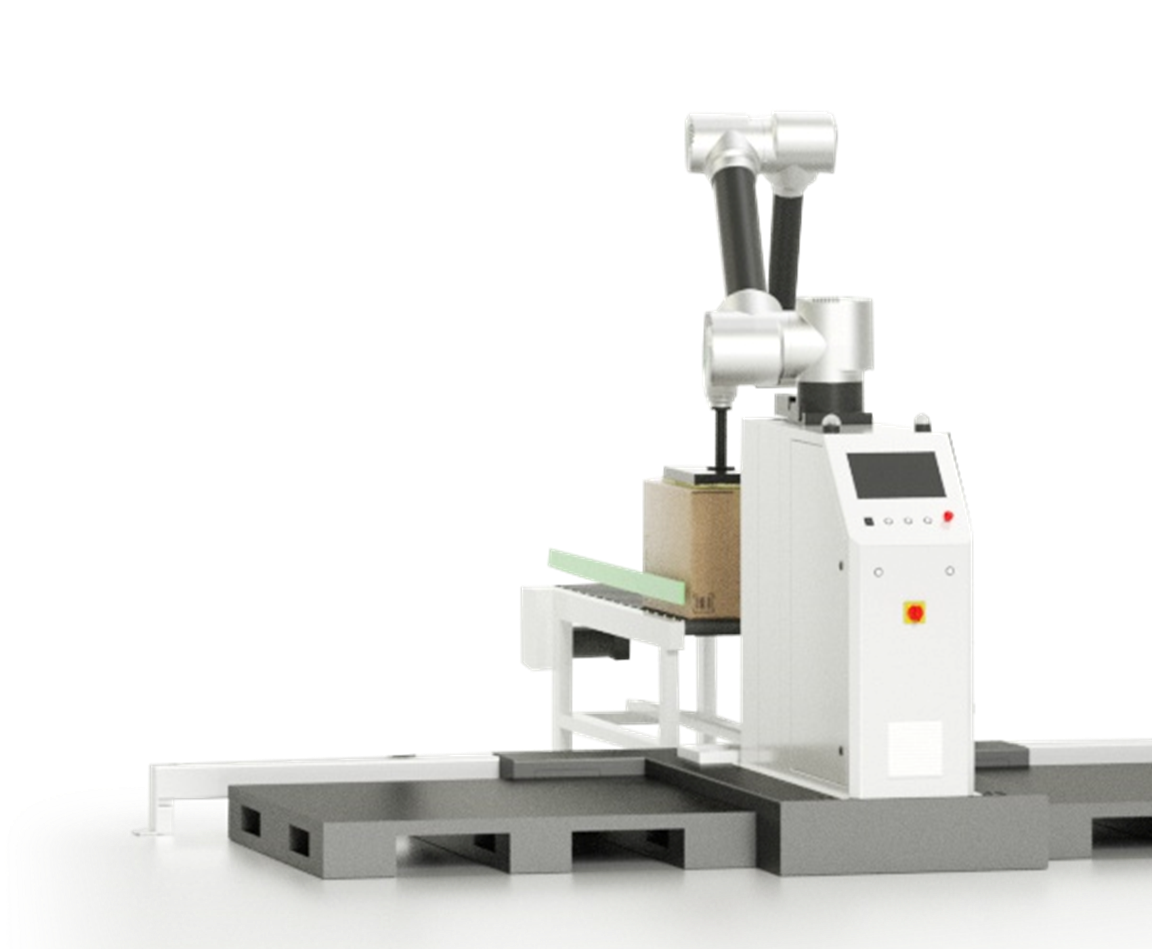
2、機器人根據預設的程序和路徑,自動調整姿態(tài)和位置,實現(xiàn)自動抓取和搬移。
3、機器人將物品按照預設的規(guī)則和要求進行碼垛處理。
4、機器人通過自主學習和自適應技術,不斷優(yōu)化工作流程和路徑,提高工作效率和穩(wěn)定性。
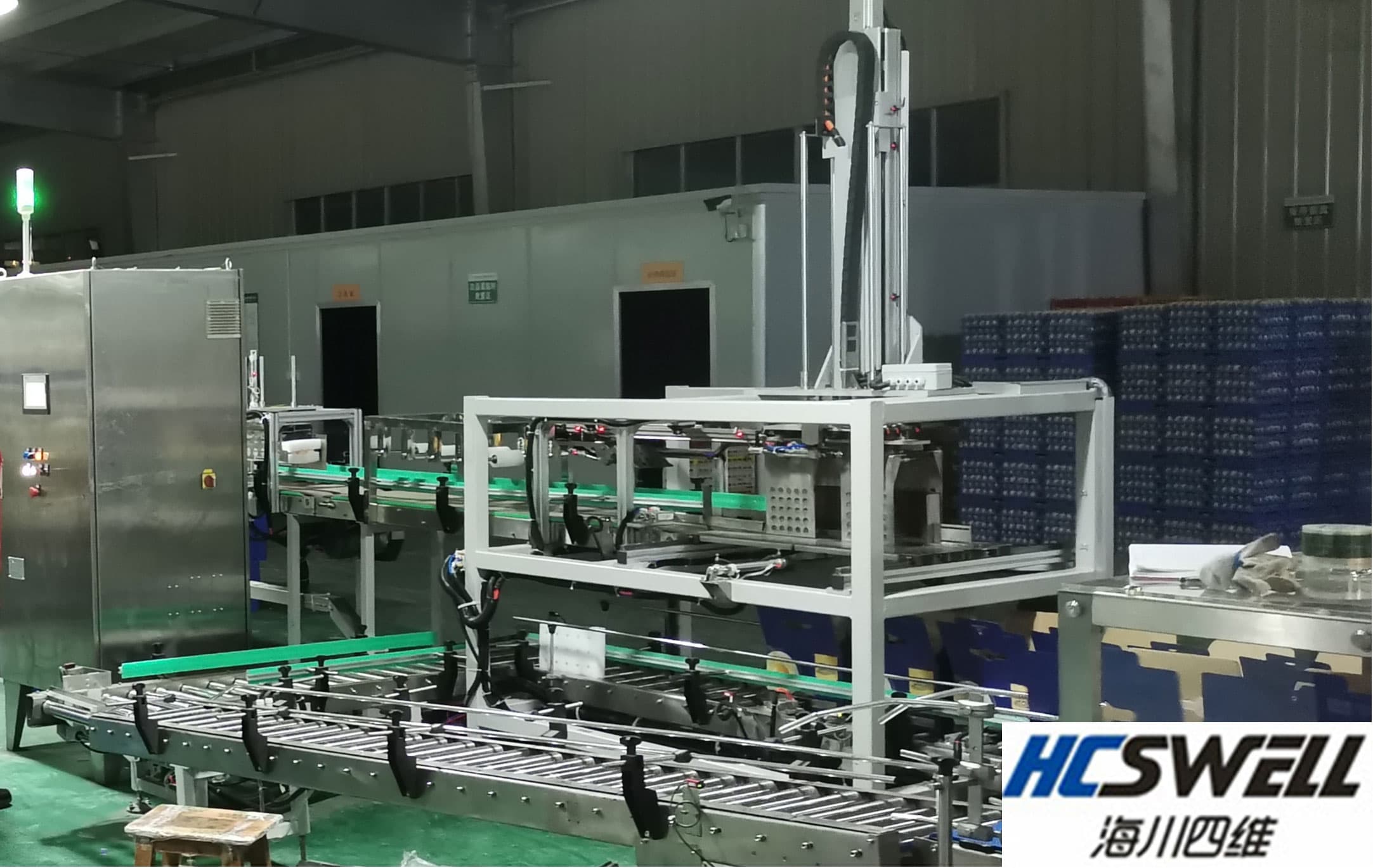
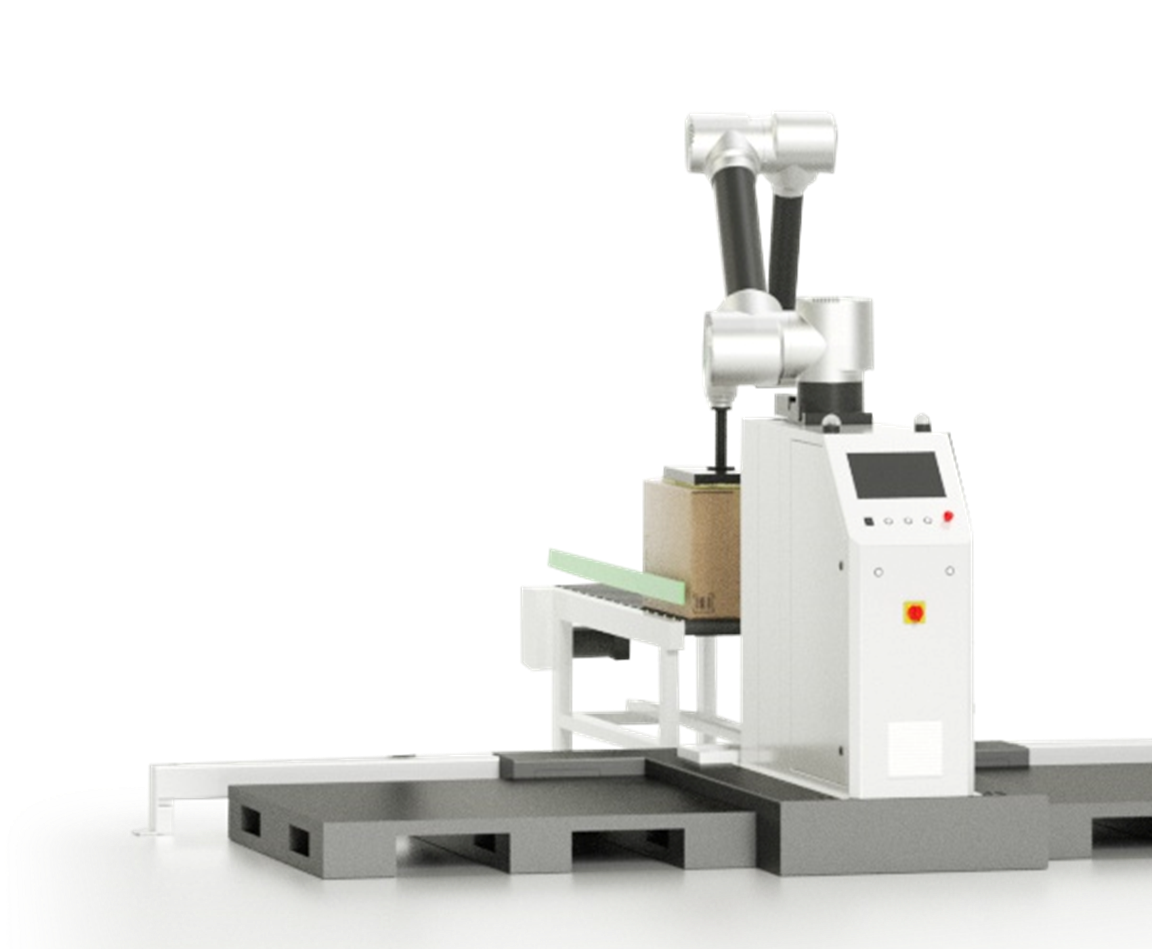
海川四維協(xié)作移動碼垛機器人整個工作流程通過機器人控制系統(tǒng)的管理和監(jiān)控,實現(xiàn)對機器人進行實時管理和監(jiān)控,確保碼垛機器人的安全性和穩(wěn)定性。
作移動碼垛機器人的工作原理和技術特點分析(協(xié)作機器人工作原理)")
三、協(xié)作移動碼垛機器人的技術特點主要體現(xiàn)在以下幾個方面:
1、是具有高精度的視覺識別技術,可以對不同形狀、不同大小的物品進行準確識別和抓取。
2、是具備自主學習和自適應的能力,可以根據不同的物品特性和工作環(huán)境,自動調整工作方式和路徑,提高工作效率和穩(wěn)定性。
3、是具有協(xié)作能力,可以與人類進行無縫協(xié)作,實現(xiàn)更高效、更安全的工作。
4、是具備高效的碼垛能力,可以根據預設的規(guī)則和要求,對待處理物品進行自動化的碼垛操作,實現(xiàn)高速度、高效率的碼垛工作。同時,碼垛機器人還具有高精度、穩(wěn)定性強的特點,可以確保碼垛的準確性和穩(wěn)定性,減少碼垛過程中出現(xiàn)的錯誤和損失,提高工作質量和效率。
總的來說,協(xié)作移動碼垛機器人是一種充滿前瞻性和創(chuàng)新性的自動化設備,通過其高精度的視覺識別技術、自主學習和自適應的能力、高效的碼垛能力以及與人類的協(xié)作能力,為物流和倉儲領域提供了全新的解決方案。隨著科技的不斷發(fā)展和應用,碼垛機器人的性能和功能將不斷升級和完善,為生產和物流行業(yè)的高效發(fā)展提供更加可靠和智能的解決方案。
本文 協(xié)作移動碼垛機器人的工作原理和技術特點分析(協(xié)作機器人工作原理):http://m.hamsc.cn/industry-news/683.html,海川四維智能科技版權所有,抄襲必究!