海川四維致力于研發和創新機器人技術應用,解決機器人在氣瓶纏繞機上下料中的技術難點。氣瓶纏繞機上下料機器人是現代工業生產中不可或缺的重要設備。然而,這一技術在實現過程中面臨著一系列的技術難點和挑戰。本文將介紹一些關鍵的技術難點,如何避免碰撞和如何精準抓取氣瓶,并討論海川四維在氣瓶纏繞機上下料機器人中創新實踐的應用和貢獻。
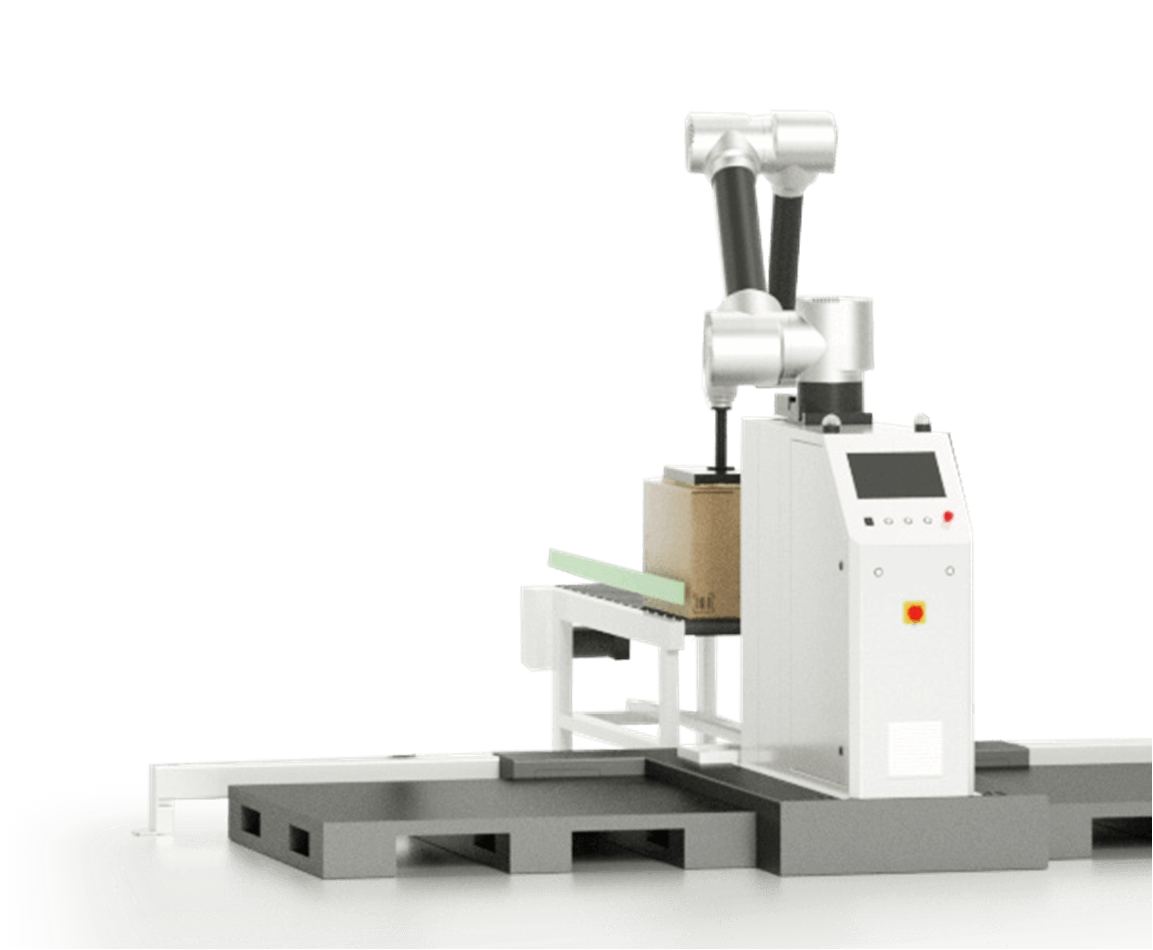
首先,精準抓取氣瓶是氣瓶纏繞機上下料機器人的重要技術難點之一。由于氣瓶形狀不規則,重量較大,機器人需要具備高精度的抓取能力。海川四維開發了一種基于深度學習的氣瓶抓取系統,該系統能夠分析氣瓶的形態和尺寸,并正確地掌握抓取位置和方式,實現精準抓取。并通過合理的抓取策略,確保機器人能夠穩定、精準地抓取氣瓶,還大大減少了人工干預,節省了生產時間和成本。

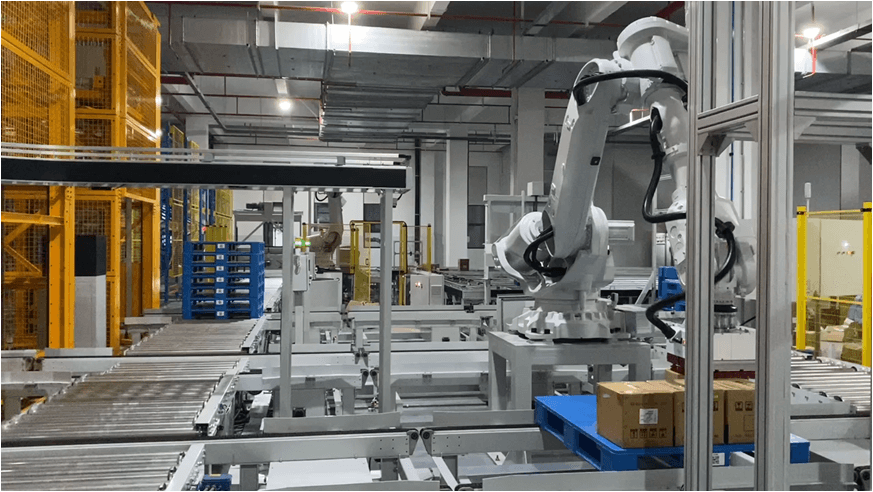
其次,避免碰撞是另一個關鍵的技術難點。在氣瓶纏繞機的操作過程中,機器人需要與其他設備和工件進行協同操作,避免碰撞和意外損壞。對于氣瓶纏繞機上下料機器人來說,機器人需要在繁忙的生產線環境中移動,并避免與其他機器人或運輸裝置發生碰撞。為了解決這個問題,海川四維使用了高精度激光跟蹤系統和多傳感器環境感知技術。這些技術使機器人能夠精確地檢測到周圍的環境,并根據情況做出相應的移動和動作決策,確保安全、高效地完成任務。
此外,氣瓶纏繞機上下料機器人還需要具備高速、高精度的運動控制能力。海川四維通過優化機器人的動力學模型和控制算法,實現了快速、平穩的運動,提高了機器人的工作效率和精度。
總之,海川四維致力于解決氣瓶纏繞機上下料機器人的技術難點,為客戶提供可靠的解決方案。通過精準抓取氣瓶、避免碰撞和高速運動控制等關鍵技術的突破,海川四維為工業生產提供了高效、智能的自動化解決方案。
本文海川四維探索氣瓶纏繞機上下料機器人的技術難點(氣瓶纏繞機上下料機器人實現智能化生產):http://m.hamsc.cn/industry-news/731.html,海川四維智能科技版權所有,抄襲必究!