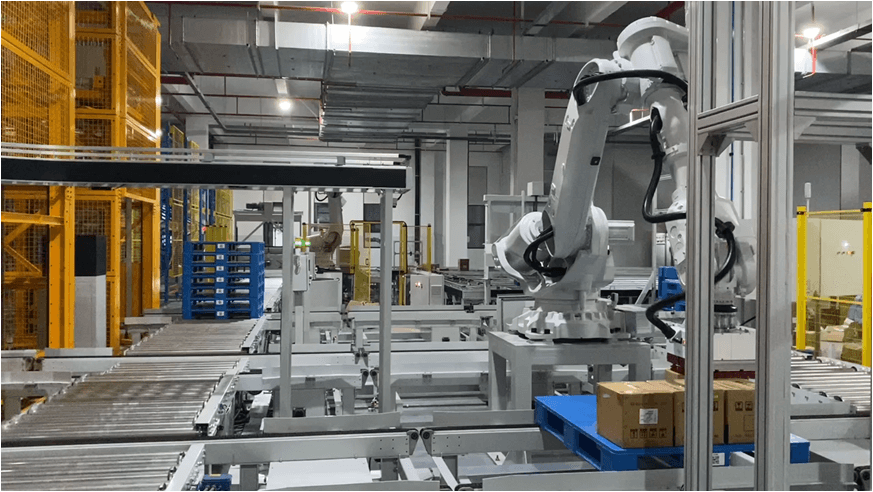
近年來,隨著物流行業的發展和自動化技術的進步,3D拆垛機器人逐漸受到廣大企業的青睞。它以其高效、精準的拆垛能力,為倉儲物流領域帶來了革命性的變化。3D拆垛機器人主要由視覺部分、觸摸屏人機交互畫面、機械機構部分和處理系統部分組成,它們共同協作,實現高效的拆垛工作。那么,讓我們和海川四維一起揭秘3D拆垛機器人的工作原理,看看它是如何實現高質量的拆垛工作的。
1、 構件分析
3D拆垛機器人主要由視覺部分、觸摸屏人機交互畫面、機械機構和處理系統部分組成。這些構件相互配合,實現了機器人系統的高效運行和智能控制。視覺系統通過3D工業相機,確保機器人能夠準確感知和識別各種不同的物體,從而開展后續的拆垛工作。同時,觸摸屏人機交互畫面為操作員提供了直觀友好的操作界面,方便用戶對機器人進行靈活的控制和監控。而機械機構和處理系統的協同工作,則為機器人系統的實際操作提供了堅實的基礎。
2、 視覺系統
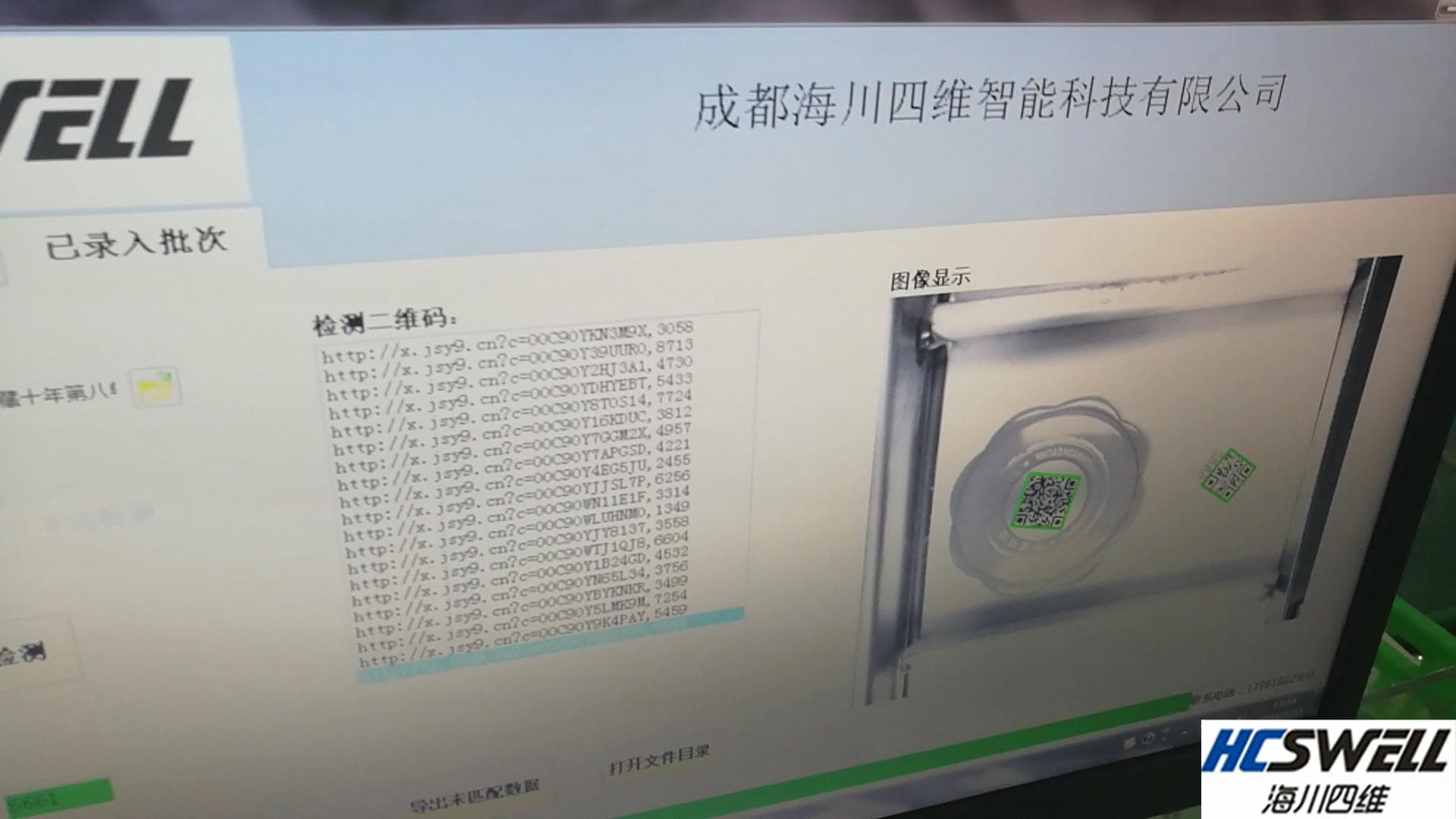
3D拆垛機器人的視覺部分采用成熟的3D工業相機,能夠輕松應對不同物體和環境,從而保證高質量的拆垛工作。這種高性能的視覺系統,使得機器人能夠精準地感知和識別各種形狀、尺寸和材質的貨物,為后續的拆垛操作提供了可靠的基礎。同時,視覺系統的智能識別與定位功能,也大大提高了機器人處理復雜環境和任務的能力,為智能物流作業帶來了全新的可能性。

3、 機械機構
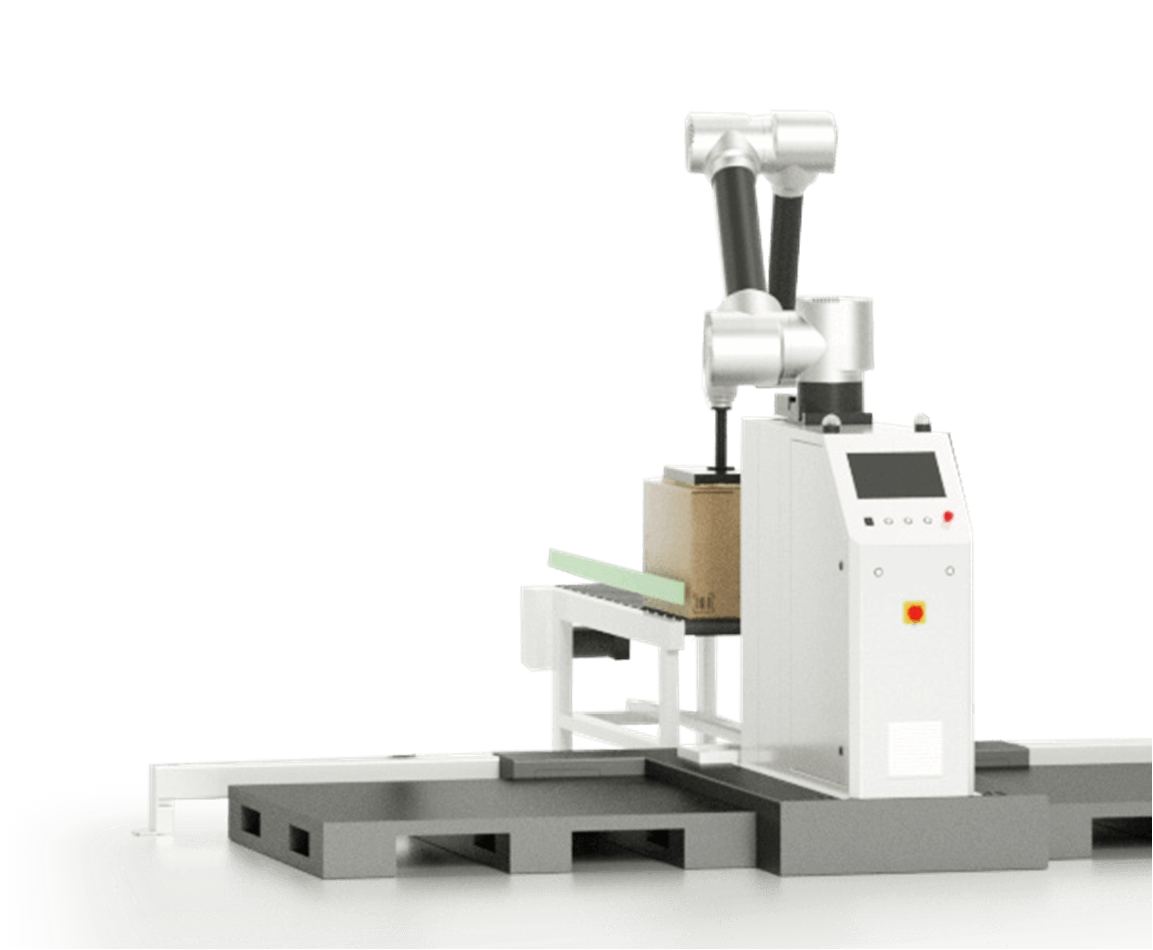
3D拆垛機器人的機械機構可根據客戶需求,針對不同的應用場景,由專業的設計人員給出設計方案。這意味著機器人的機械結構可以根據實際情況進行個性化定制,以適應不同的拆垛環境和場景需求。由于物流行業的多樣性和復雜性,這種定制化的機械機構設計,使得機器人能夠更好地適用于各種不同的拆垛作業,提高了機器人系統的靈活性和適用性。
4、 處理系統
海川四維3D拆垛機器人采用相機+視覺處理系統,可以進行設置,可實現拆垛、碼垛、零件定位抓取和路徑規劃功能。這意味著機器人系統具備了全面的自動化控制和作業功能,能夠滿足復雜的拆垛作業需求。通過處理系統的強大功能,機器人能夠實現高效的拆垛操作,實時調整路徑規劃,提高作業效率和準確性,為智能物流作業帶來更大的便利和效益。
綜上所述,3D拆垛機器人憑借著視覺部分的高精度識別能力、機械機構的穩定性和處理系統的智能化管理,實現了高質量的拆垛工作。它能夠應對不同物體、不同環境下的拆垛需求,提高了工作效率和準確性,為企業節約了人力成本和時間成本。隨著科技的不斷進步和應用場景的擴大,海川四維相信3D拆垛機器人將在物流領域發揮越來越重要的作用,助力企業實現更高效、智能的倉儲物流管理。
本文揭秘3D拆垛機器人的組成部分(3D拆垛機器人如何實現高質量拆垛):http://m.hamsc.cn/industry-news/803.html,海川四維智能科技版權所有,抄襲必究!