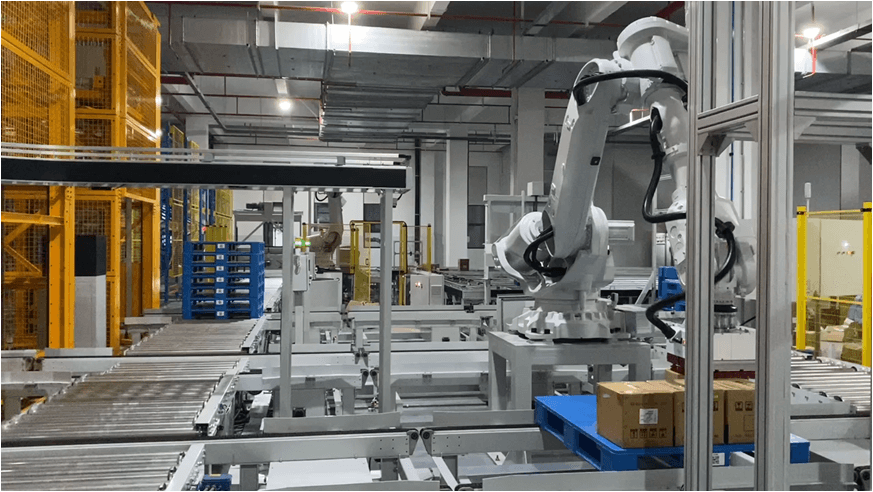
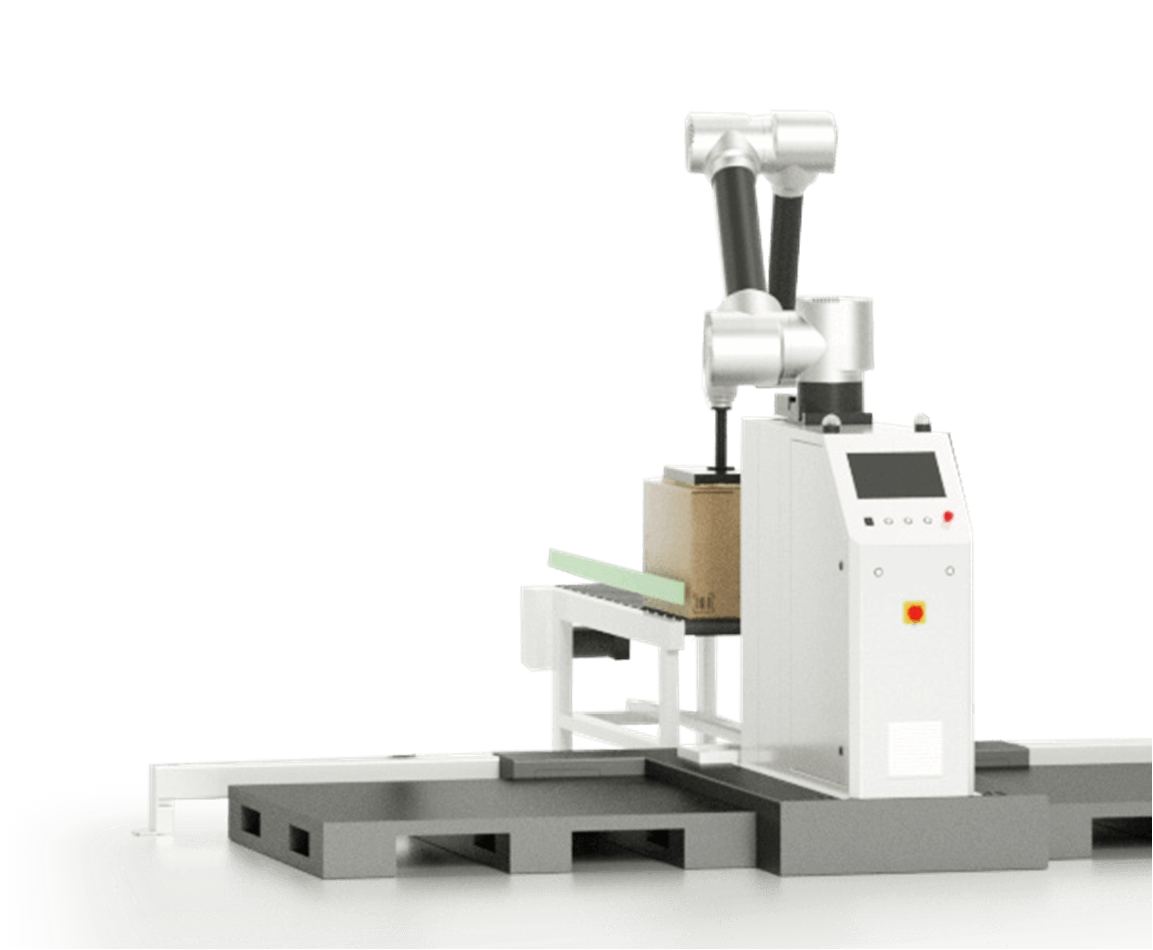
AGV復(fù)合機(jī)器人是一種能夠自主行駛和執(zhí)行任務(wù)的智能機(jī)器人系統(tǒng)。它在工業(yè)自動(dòng)化領(lǐng)域發(fā)揮著重要作用。AGV復(fù)合機(jī)器人的核心技術(shù)包括導(dǎo)航技術(shù)、驅(qū)動(dòng)技術(shù)和控制系統(tǒng)技術(shù),這些技術(shù)共同構(gòu)成了AGV機(jī)器人的關(guān)鍵能力。海川四維將圍繞以下三個(gè)方面展開(kāi)介紹。
1. 導(dǎo)航技術(shù)
AGV機(jī)器人的自主行駛能力建立在可靠的導(dǎo)航技術(shù)之上。目前主要的導(dǎo)航方式包括電磁導(dǎo)航、激光導(dǎo)航和視覺(jué)導(dǎo)航。電磁導(dǎo)航利用地面埋設(shè)的線圈或磁條進(jìn)行定位;海川四維AGV復(fù)合機(jī)器人采用激光導(dǎo)航技術(shù),激光導(dǎo)航則通過(guò)激光雷達(dá)實(shí)現(xiàn)環(huán)境地圖的構(gòu)建和定位;而視覺(jué)導(dǎo)航則依賴攝像頭等傳感器獲取環(huán)境信息并進(jìn)行位置識(shí)別。這些導(dǎo)航技術(shù)的發(fā)展使得AGV機(jī)器人能夠在復(fù)雜的環(huán)境中準(zhǔn)確行駛。
合機(jī)器人核心技術(shù)")
2. 驅(qū)動(dòng)技術(shù)
AGV機(jī)器人的速度和加速度決定了其工作效率和響應(yīng)能力,而驅(qū)動(dòng)技術(shù)是實(shí)現(xiàn)這一目標(biāo)的關(guān)鍵。電機(jī)驅(qū)動(dòng)、液壓驅(qū)動(dòng)和氣壓驅(qū)動(dòng)等多種方式,每一種都有其獨(dú)特的優(yōu)勢(shì)。電機(jī)驅(qū)動(dòng)靈活高效,液壓驅(qū)動(dòng)穩(wěn)定強(qiáng)大,氣壓驅(qū)動(dòng)適用于特殊環(huán)境。綜合運(yùn)用這些驅(qū)動(dòng)技術(shù),可以根據(jù)不同任務(wù)的需求,為AGV機(jī)器人提供定制化的動(dòng)力支持,使其能夠在工作中達(dá)到良好狀態(tài)。
3. 控制系統(tǒng)技術(shù)
導(dǎo)航和驅(qū)動(dòng)等功能的協(xié)同工作需要一個(gè)強(qiáng)大而智能的控制系統(tǒng)。控制系統(tǒng)技術(shù)不僅僅是將各項(xiàng)技術(shù)簡(jiǎn)單堆砌,更是要實(shí)現(xiàn)高效的整合與協(xié)同。通過(guò)先進(jìn)的傳感器技術(shù),實(shí)時(shí)收集環(huán)境信息,通過(guò)強(qiáng)大的處理器進(jìn)行分析和決策,實(shí)現(xiàn)對(duì)AGV機(jī)器人的全面掌控。這個(gè)系統(tǒng)不僅要穩(wěn)定可靠,還要具備靈活性,以適應(yīng)各種工作場(chǎng)景,實(shí)現(xiàn)AGV機(jī)器人的真正自主運(yùn)行。
AGV復(fù)合機(jī)器人的核心技術(shù)不斷演進(jìn)和完善,為工業(yè)自動(dòng)化和物流領(lǐng)域帶來(lái)了巨大的便利和效益。其核心技術(shù)是一個(gè)多學(xué)科、多技術(shù)融合的體系,其導(dǎo)航、驅(qū)動(dòng)和控制系統(tǒng)的高度協(xié)同是實(shí)現(xiàn)自主運(yùn)行的關(guān)鍵。海川四維AGV復(fù)合機(jī)器人的應(yīng)用機(jī)械臂可根據(jù)需求進(jìn)行更換,為生產(chǎn)過(guò)程帶來(lái)更高的效率和更可靠的表現(xiàn)。
本文AGV復(fù)合機(jī)器人核心技術(shù)(探索AGV復(fù)合機(jī)器人的核心技術(shù)):http://m.hamsc.cn/industry-news/811.html,海川四維智能科技版權(quán)所有,抄襲必究!