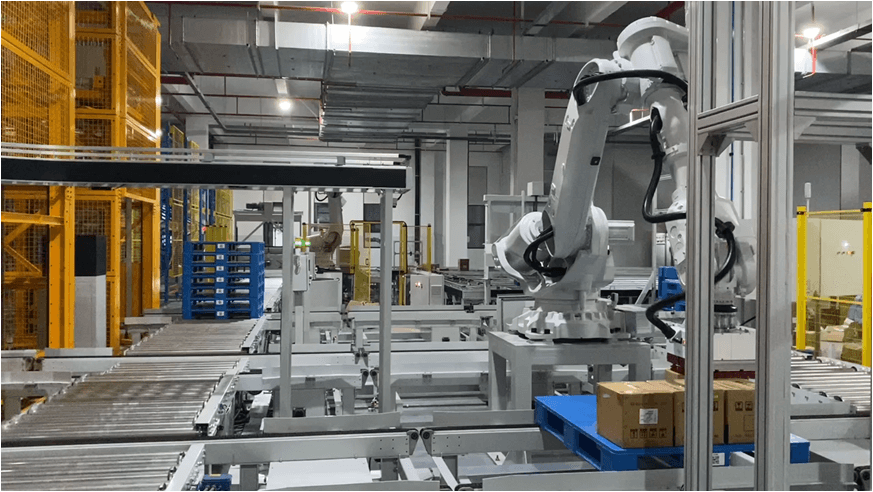
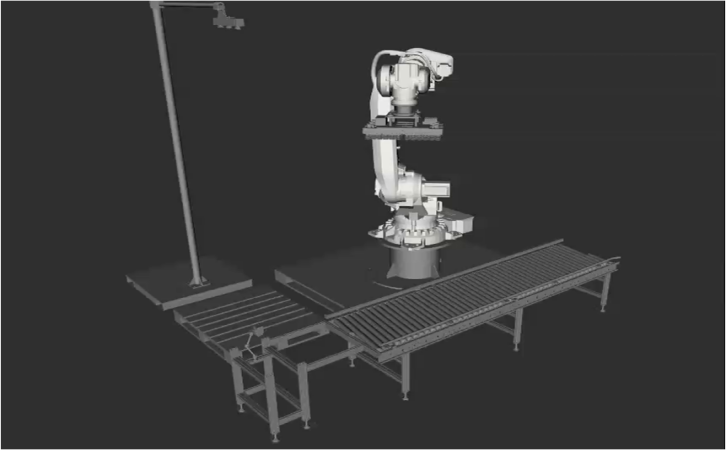
3D拆垛機器人的專業(yè)技術(shù)原理:
根據(jù)快速、精確的3D結(jié)構(gòu)光成像技術(shù),對物件表面輪廊開展掃描儀,產(chǎn)生點云數(shù)據(jù);對其點云數(shù)據(jù)開展數(shù)據(jù)分析系統(tǒng)解決,進行AI優(yōu)化算法、機器人途徑自動規(guī)劃、全自動防碰撞等信息化技術(shù);算出現(xiàn)階段產(chǎn)品工件即時空間坐標,并正確引導機器人進行自行爬取每日任務(wù)。

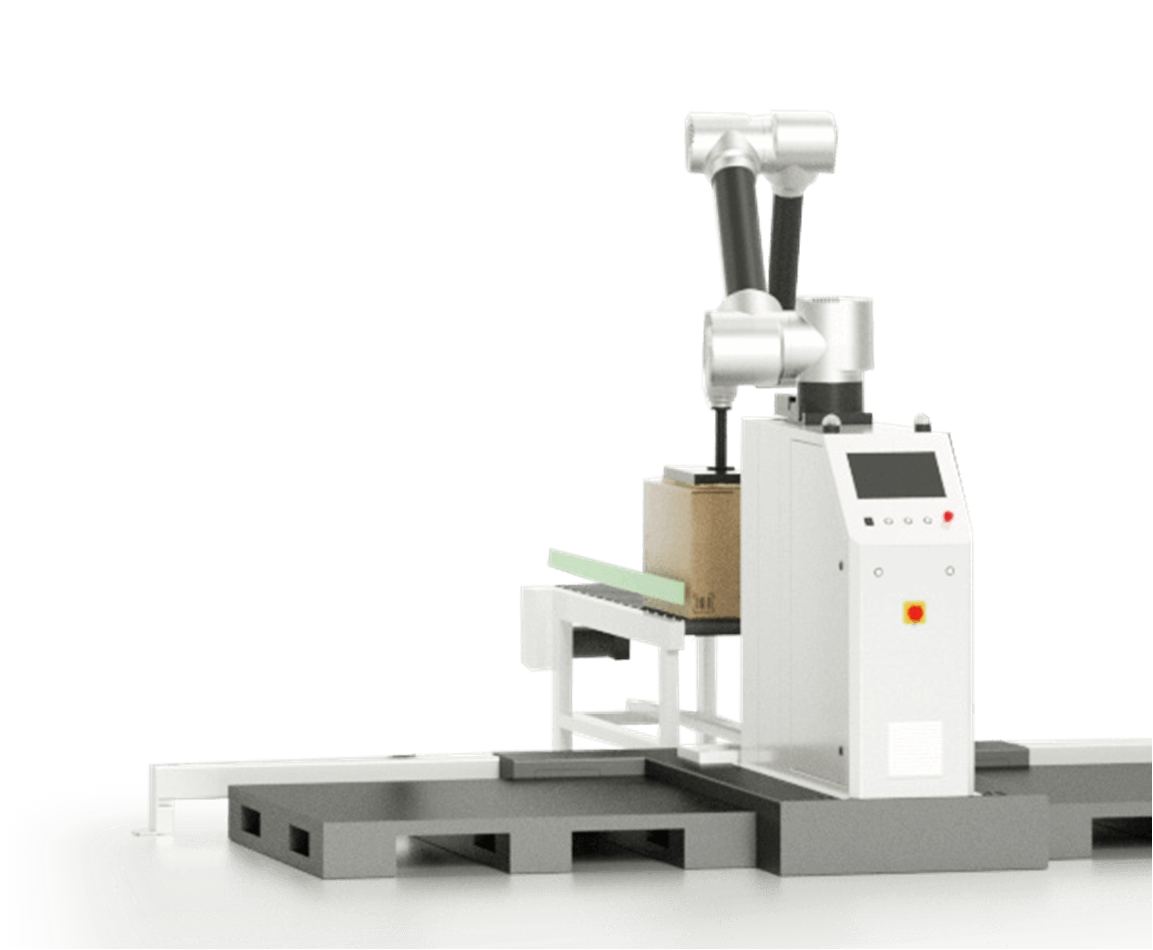
3D拆垛機器人的特征:
1.高效率、環(huán)境保護、使用方便、維護保養(yǎng)便捷,它與其他輸送機械設(shè)備配套設(shè)施應(yīng)用可進行破袋機倒料等作用。
2.有著工作中靠譜、消耗功率小的特征,它尤其于有毒易燃性和弱浸蝕、高煙塵及工作人員不容易觸碰的場所。
3.可配套設(shè)施拆包機完成解包加料潔凈化,克服了化工廠、塑膠行業(yè)的一大難題。
3D拆垛機器人能夠?qū)崿F(xiàn)拆垛的專業(yè)化和自動化技術(shù),并且不畏自然環(huán)境狀況,可以替代人工在繁雜或是有危害生產(chǎn)自然界中實際操作運作,降低了一些有危害原材料對身體的損害并且能夠大大的提高工作效率并節(jié)省人工成本費。
本文3D拆垛機器人的技術(shù)原理和特點:http://m.hamsc.cn/industry-news/449.html,海川四維智能科技版權(quán)所有,抄襲必究!