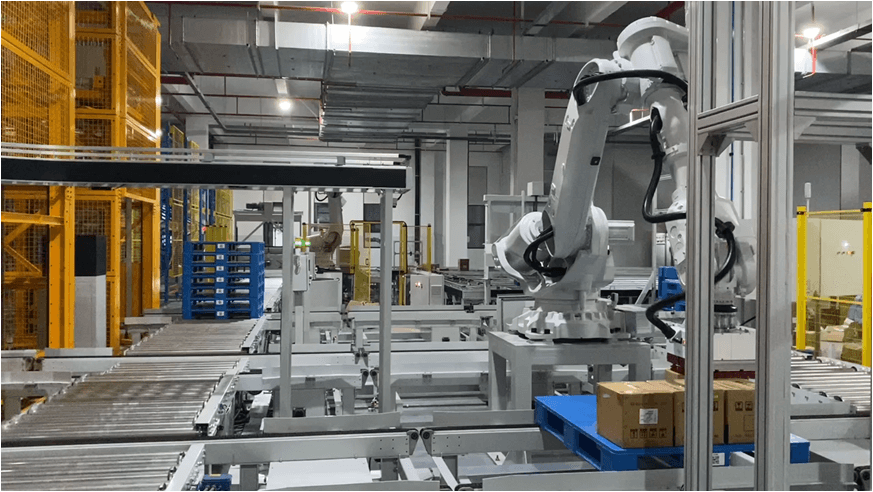
海川碼垛機器人夾持式手部適用于具有形狀規則、表面粗糙特點的紙箱包裝類產品的搬運。為增加碼垛機器人夾持式手部的通用性,通常將它設計為平移型,當它在夾持時與產品進行面觸碰,放開后手爪有一定的距離的開距。通過驅動來拉伸一側的手爪或使兩側手爪同步運動,從而保證產品順利進入或脫開手爪。

一、海川碼垛機器人平移夾持式手部驅動
平移夾持式手部驅動一般挑選氣動或伺服。氣動驅動的制造成本低、維護成本低,但會增加手部質量,影響機械手的搬運負載。在手部裝置固定后,如果搬運產品的尺寸和質量發生變化,只能通過調節供氣壓力來修改夾緊力,在變化很大的情況下無法滿足要求。伺服驅動平移夾持式手部制造成本高、維護成本高,整體質量較輕,對機械手搬運負載的影響低,可以在電機的控制器上輕易地調節螺距來操縱夾緊力,以滿足搬運產品的尺寸和質量變化。海川碼垛機械手的應用程序里所需用精準定位的僅僅只需要兩個點,一個是抓起點,一個是放置點,除了這兩個點,之間其他的軌道全部由計算機來實現操縱。

二、海川碼垛機器人平移夾持式手部手爪
平移夾持式手部的手爪可以設計為整體式,也可以設計為鏤空式。鏤空式手爪雖然可以減少材料的使用、減輕自重,但同時會減小手爪與搬運產品之間的觸碰面積,從而降低承載能力,所以不適合于重載、表面光滑的搬運產品或包裝;對于具有形狀不規則特點的桶料包裝類產品,一般也采用平移夾持式手部進行搬運,只是手爪要對于桶料包裝的形狀和尺寸進行特殊設計,通常設計為V形;對于具有形變量大、規則不一特點的料袋包裝產品的搬運,需用將手部設計為回轉抓取式。將手爪結構設計為全刨或半刨型,通過驅動來操縱手爪的回轉,來實現產品抓取時的收放,并避免損壞料袋包裝,同時確保料袋變形小、搬運平穩。對于搬運不同尺寸的料袋包裝產品,在滿足驅動力的條件下,只需修改手爪的強度和尺寸就可以實現。

三、海川碼垛機器人機械手的選用
實際工程應用中,碼垛機是否挑選機械手,除了使用需求之外,還要綜合考慮空間、投入、成本回收等因素。在挑選機械手的手部時,主要是考慮到搬運產品的包裝特點。在機械手碼垛機中,由于真空系統對于光滑平整的產品或包裝具有天然的吸放優勢,這類產品或包裝的碼垛應優先選擇吸附式手部。另外,相比于機械式手部,吸附式手部功能更多、設計更簡單、組裝更方便、更高效、節能,但有噪聲、吸盤磨損消耗大。
標準規格的海川碼垛機器人的堆垛速度可以達到二十五箱/分鐘,對于其它所需要的特殊的需求和功能,還可以進行量身訂做。
本文海川碼垛機器人夾持式手部:http://m.hamsc.cn/industry-news/152.html,海川四維智能科技版權所有,抄襲必究!