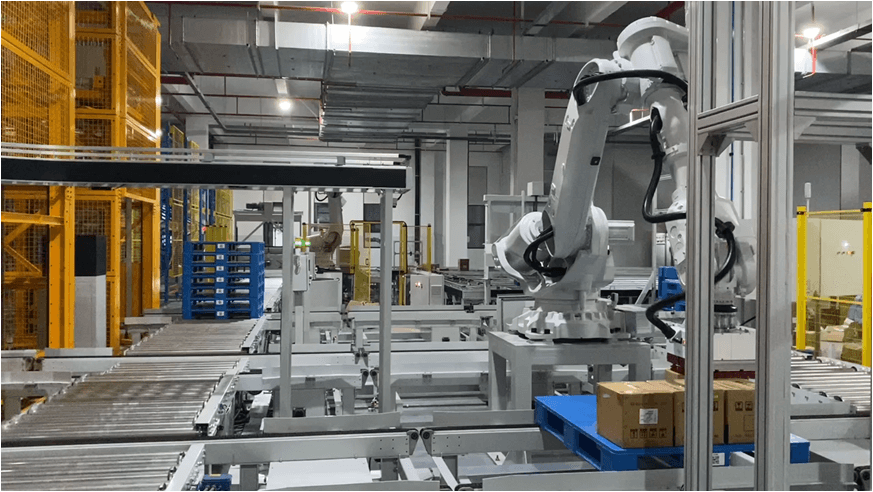
海川碼垛機器人執(zhí)行的多是抓放操作,即機器人從傳送帶上抓取物料,沿運動路徑將其放置在托盤上指定位置的動作循環(huán)。故根據(jù)機器人在完成碼垛作業(yè)時其與傳送帶及托盤的位置關系,綜合考慮運動過程障礙物情況,選用“門”字形運動軌跡。注意到機器人末端執(zhí)行器在完成托盤上不同位置紙箱的碼放時,所走軌跡均為“門”字形,僅因紙箱在托盤上位置不同導致軌跡終點坐標不同。

所謂碼垛是按照集成單元化思想,將物料按照一定模式堆碼成垛,以便使單元化的物垛實現(xiàn)物料的存儲、搬運、裝卸、運輸?shù)任锪骰顒印Ec傳統(tǒng)的人工碼垛及龍門式碼垛機相比,海川碼垛機器人因其生產(chǎn)效率高、占地空間小、動作靈活性大、人工勞動強度低等特點,逐漸被應用到各個領域中。
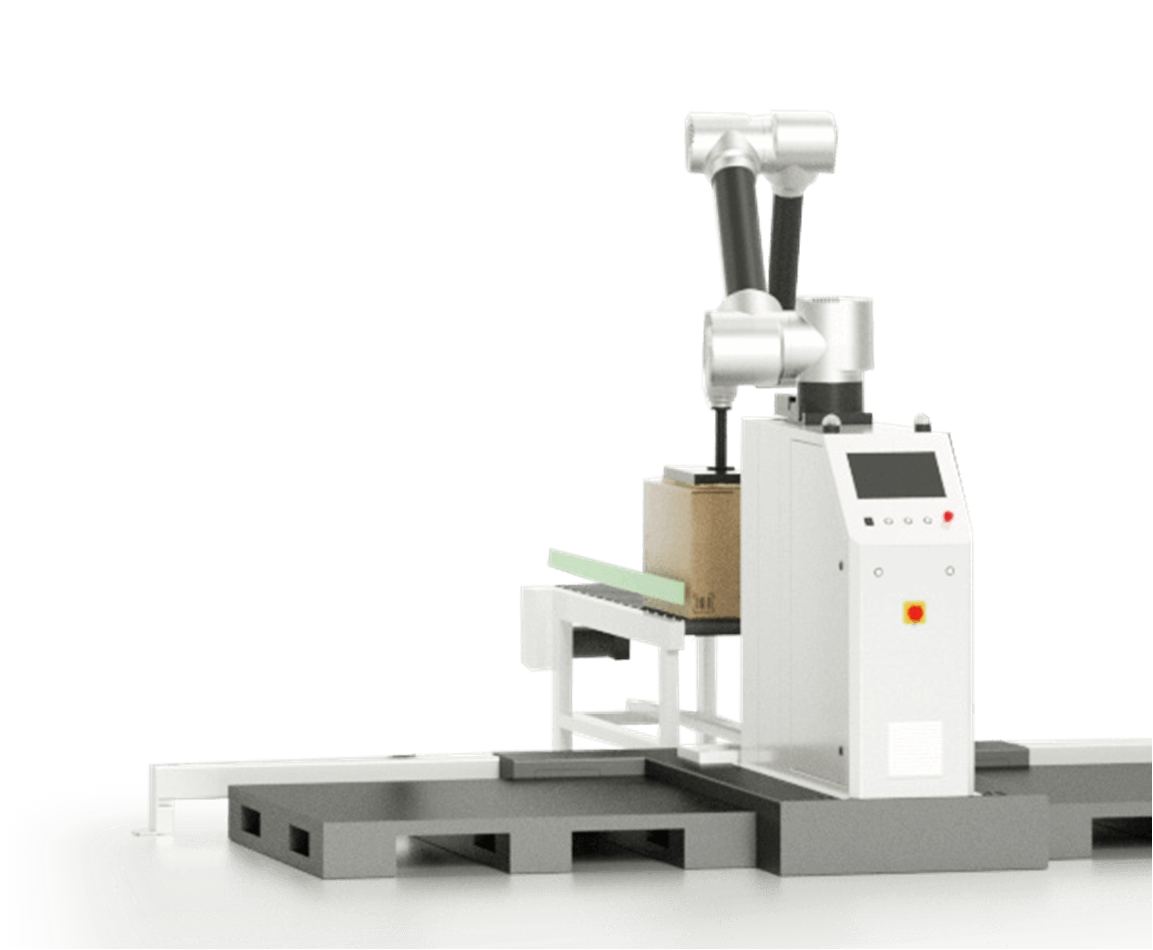
常用的碼垛機器人手抓
夾爪式機械手爪:主要用于高速碼袋;
夾板式機械手爪:主要適用于箱盒碼垛;
真空吸取式機械手爪:主要適用于可吸取的碼放物;
混合抓取式機械手爪:主要適用于可吸取的碼放物;
混合抓取式機械手爪:適用于幾個工位的協(xié)作抓放。
在采用碼垛機器人的時候,需要考慮一個重要的事情,就是機器人怎樣抓住一個產(chǎn)品。真空抓手是最常見的機械臂臂端工具(EOAT)。相對來說,它們價格便宜,易于操作,而且能夠有效裝載大部分負載物。但是在一些特定的應用中,真空抓手也會遇到問題,例如表面多孔的基質(zhì),內(nèi)容物為液體的軟包裝,或者表面不平整的包裝等等。
碼垛機器人分類
根據(jù)機械結構的不同, 碼垛機器人包括如下三種形式: 笛卡耳式、旋轉(zhuǎn)關節(jié)式和龍門起重架式。
①笛卡耳式碼垛機器人:主要由四部分組成: 立柱、X向臂、Y向臂和抓手, 以四個自 由度(包括三個移動關節(jié)和一個旋轉(zhuǎn)關節(jié))完成對物料的碼垛。這種形式的碼垛機構造簡單,機體剛性較強,可搬重量較大,適用于較重物料的碼垛。
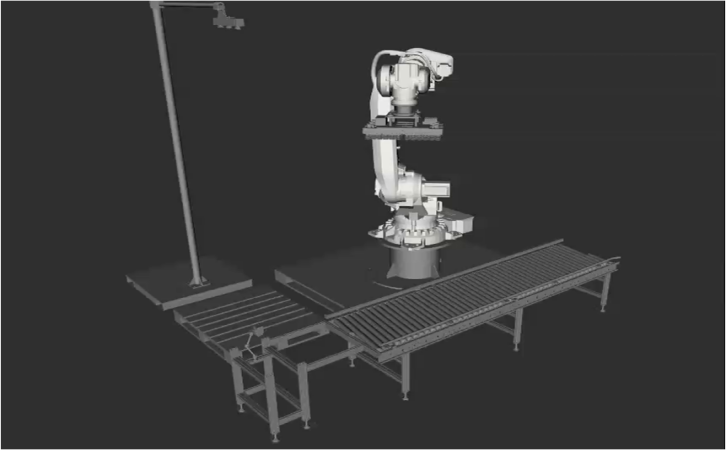
②旋轉(zhuǎn)關節(jié)式機器人:碼垛機繞機身旋轉(zhuǎn),包括四個旋轉(zhuǎn)關節(jié):腰關節(jié)、肩關節(jié)、肘關節(jié)和腕關節(jié)。這種形式的碼垛機是通過示教的方式實現(xiàn)編程的,即操作員手持示教盒,控制機器人按規(guī)定的動作而運動,于是運動過程便存儲在存儲器中,以后自動運行時可以再現(xiàn)這一運動過程。這種機器人機身小而動作范圍大,可同時進行一個或幾個托盤的同時碼垛能夠靈活機動地對應進行多種產(chǎn)品生產(chǎn)線的工作。
③龍門起重架式:將機器人手臂裝在龍門起重架上稱為龍門架式碼垛機器人,這種碼垛機器人具有較大的工作范圍,能夠抓取較重的物料。
海川碼垛機器人廣泛用于尼龍袋、紙袋、塑料袋、紙箱、塑料容器、玻璃瓶、PET瓶等各種包裝產(chǎn)品的碼垛和卸載任務。
本文海川碼垛機器人的原理:http://m.hamsc.cn/industry-news/192.html,海川四維智能科技版權所有,抄襲必究!